Famille de processus avec mémoire

1
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 51
Bloc 2 : Notions de base
Semaine 5: types de processus
stochastiques partie II
GEI 756
Processus stochastiques et traitement
statistique de signaux aléatoires
Denis Gingras
Janvier 2013
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 52
Plan du cours
Indépendance en probabilité conditionnelle
Processus de renouvellement
Probabilité Chaîne de Markov
Modèle de Markov caché
Algorithme « Forward », « Backward » et de Viterbi
Processus de comptage
Processus de Poisson simple et composé
Bruit de grenaille
Semaine 5: types de processus stochastiques Partie II

2
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 53
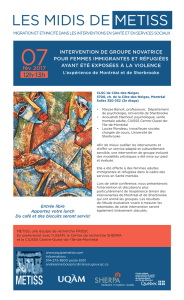
Familles de processus
Avec mémoire
(cas
particuliers)
Sans
mémoire
Semaine 4
Semaine 5
Avec
mémoire
Sans
mémoire
1) La marche aléatoire est une
chaîne de Markov avec un
nombre infini d’état.
2) Tout processus à moyenne
nulle et à accroissements
indépendants (ex.Wiener discret)
est une martingale.
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 54
DTDV,Discret Time / Discret Values, processus à temps
discret et à valeurs discrètes.
DTCV,Discret Time / Continuous Values, processus à
temps discret et à valeurs continues.
CTDV,Continuous Time / Discret Values, processus à
temps continu et à valeurs discrètes.
CTCV,Continuous Time / Continuous Values, processus à
temps continu et à valeurs continues.
NB: Un processus ponctuel n’est pas nécessairement
discret, ni dans le temps, ni dans ses valeurs.
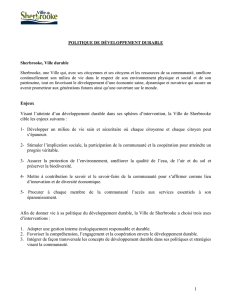
Quatre types de processus stochastiques

3
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 55
Quatre types de processus stochastiques
Processus de Bernouilli Processus de Poisson (temps d’arrivée)
Processus de Poisson (nombre d’occurrences) Processus gaussien
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 56
Notion d’indépendance conditionnelle
Soient x,y,z trois séquences aléatoires discrètes.
On dit que xest indépendante de ysi et seulement si,
, : ( , ) ( ) ( )
i j i j
i j P x y P x P y
On dit que xest indépendant de yconditionnellement à
zsi et seulement si,
, , : ( , ) ( ) ( )
i j k i k j k
i j k P x y z P x z P y z
La notion d’indépendance conditionnelle (d’ensembles) de v.a. est
une notion fondamentale dans le domaine des processus aléatoires
pour la construction de modèles à partir d’hypothèses physiques
ou pour la mise au point d’algorithmes efficaces d’inférence.

4
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 57
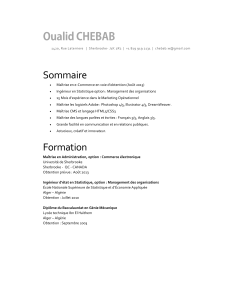
Représentation graphique de probabilités
conditionnelles
( , , ,...) ( ) ( ) ( )....
P A B C P A P B A P C B
Graphiquement une telle factorisation des probabilité
conditionnelles des états A, B et C … est représentée
comme suit,
En cas d’absence d’indépendance conditionnelle, de
plusieurs « états » (évènements) nous avons
souvent une dépendance en « chaîne » de la forme,
A B C…
( )
P B A
P A
P B
( )
P C B
P C
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 58
Filtration
Soit xtun processus stochastique
Associé au processus nous avons l’espace échantillonnal
Chaque point (un résultat) dans correspond à une trajectoire (i.e., une seule
réalisation du processus).
Aussi associé au processus, est l’ensemble des évènements, F, une collection
exhaustive des sous-ensembles de (constituant un sigma-algèbre), auxquels
on associe une masse de probabilité à chacun des sous-ensembles.
Pour les processus temporel, à chaque temps t, on définit Ft(Ft
F),lequel est
un sous-ensemble d’évènements de Fau temps t.
A
Ftssi A=f(x1,…,xt). Ainsi, alors que x1,…xtprennent des valeurs connues au
temps t, A prends aussi une valeur connue au temps t.
La famille de sous-ensembles imbriqués (nested), (Ft), t
0est connue sous le
nom de « filtration naturelle » associée au processus stochastique xt.
La filtration décrit l’information gagnée à partir des observations du processus
jusqu’au temps t.

5
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 59
La propriété markovienne
Un processus qui ne dépend aucunement de ses réalisations
antérieures est un processus sans mémoire.
La propriété markovienne est une propriété de mémoire finie dans le
temps. Lorsque l’évolution future d’un processus aléatoire ne dépend
pas de son évolution passée, mais seulement de sa dernière réalisation
(mémoire finie) et de son état présent, le processus possède la
propriété markovienne.
Un processus stochastique qui a la propriété markovienne est appelé
un processus de Markov.
Si l’espace d’états (l’espace des valeurs que peut prendre le processus)
et le temps sont discrets, on parle alors de chaînes de Markov.
Lorsque l’espace d’état est discret mais que le temps est continu, on
parle de processus à sauts.
UNIVERSITÉ DE
SHERBROOKE
8-févr.-13 D Gingras - UdeS - GEI 756 Bloc 2 Semaine 510
La propriété markovienne
Pour le cas à temps discret, nous avons,
Définition: Soit un processus stochastique continu x(t), t .
Alors x(t) est dit avoir la propriété markovienne si t, la PDF
1 2 1 2 1
[ ,... ] [ ], ...
x n x n
f x t |x t ,x t x t f x t |x t t t t t
[ 1 ,... ... ] [ 1 ],
x x
f x n |x n ,x n-2 x n f x n |x n n
La distribution conjointe du processus x(n) à partir de 0,
[ 0 ,... ]
[ 0 ] [ 1 0 ] [ 2 1 0 ] [ 3 2 1 0 ]...
x
x x x x
f x ,x 1 x n
f x f x |x f x |x ,x f x |x ,x ,x
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%