Tension 24 VDC / 48 VDC - sanyo denki europe s.a.

INFORMATION NOUVEAU PRODUIT
Driver Pas-à-pas Boucle Fermée
Double Axe Interface EtherCAT
SANYO DENKI
EUROPE SA.
vous présente ses nouveaux drivers pas-à-pas en boucle fermée double axe, avec interface
EtherCAT intégrée. Ce driver a été conçu pour une utilisation en réseau ouvert ultra-rapide et peut être combiné aux nombreux moteurs
pas-à-pas PBM associés.
1 Interface de communication haut-débit EtherCAT
Basé sur le système de câblage largement répandu 100BASE-TX, avec un débit de 100 Mbps full-duplex intégral, EtherCAT permet
une communication très rapide et très able.
2 Double axe - Faible encombrement
Comme un seul driver peut contrôler deux moteurs, l’encombrement d’installation est réduit de 30% par rapport à l’utilisation de
deux drivers simple axe actuels (modèle PB3C003M20x).
3 Opération de synchronisation simple
Une fonction de synchronisation en mode «prole position» élimine le besoin de contrôler l’erreur de poursuite, réduisant la charge
du contrôleur et limitant le stress du système mécanique.
4 Codeur incrémental ou absolu selon l’utilisation
En supplément du codeur incrémental, l’option codeur absolu est aussi disponible. Celle-ci permet d’éviter les prises d’origine sys-
tématiques en cas de coupure secteur et fournit des gains de productivité.
Points clés
Tension 24 VDC / 48 VDC
Driver
Driver double axe interface EtherCAT
Moteur
Tailles du flasque (carré)
28 mm ° 42 mm ° 60 mm
Modèles
Standard ° Réducteur à faible jeu °
Modèle Spur Gear °
Modèle Harmonic Gear °
Frein électromagnétique
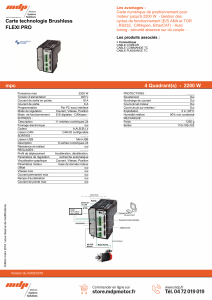
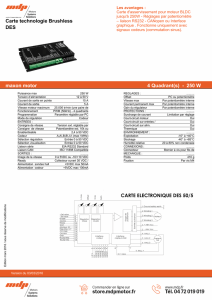
PB4 D
Tension d’entrée
A entrée AC
D entrée DC
003
Courant en
sortie
001 1 A / phase
002 2 A / phase
003 3 A / phase
Communication
E EtherCAT
M Interface multiple
P Train d’impulsions
R RS-485 + PIO
Type de
codeur
23 voies INC
500 P/R
A ABS (17bit)
Spécifications
00 standard
01 photo coupler
02 line driver
D0 2 axis standard
Série
PB2
PB3
PB4
E 2 D0
Contactez-nous pour connaître les références disponibles
Comment lire la référence

Pour de plus amples informations sur la gamme «SANMOTION Model No. PB», contactez-nous au +33 1 48 63 26 61 ou par e-mail à info@sanyodenki.eu.
Machines de fabrication des semi-conducteurs, robotique, emballage, médical, équipements industriels...
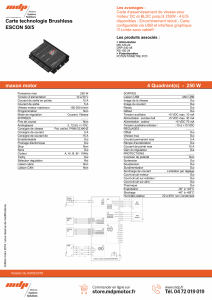
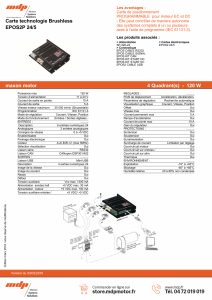
Alimentation
DC
Capteur externe E/S
Câble E/S
Modèles : PBC1S0010A (non blindé)
PBC1S0010C (blindé)
CN6 Câble extension codeur
Modèle PBC9P0020A
CN4
CN5 Câble extension moteur
Modèle PBC8M0030A
EtherCAT
EtherCAT
Vers le driver suivant
CN0
CN1
CN2
CN3 Moteur (axis 1)
Moteur (axis 2)
PC
Logiciel PC
Modèle SPBE1W-01
CN8
USB/RS-485
Convertisseur
Dispositif hôte
Câble extension codeur
Modèles : PBC7E0030A
PBC8E0030A
Référence du driver PB4D003E2D0 PB4D003EAD0
Spécication codeur Optique incrémental (500 PPR) Absolu (17 bit + rotation multiple 16 bit)
Références des moteurs associés PBM282, PBM284, PBM423, PBM603, PBM604 PBM423, PBM603, PBM604
Tension d’alimentation Alimentation principale 24/48 VDC +/-10% 5 A
Alimentation de contrôle 24 VDC +/-10% 5 A
Mode de contrôle Méthode de contrôle par PWM SIN
Environnement
Température ambiante Fonctionnement : de 0 à 55° C Stockage : de -20 à 65° C
Humidité ambiante 90% RH (sans condensation)
Résistance aux vibrations 0.5G (plage de fréquence 10 à 55Hz, testé pendant 2 heures dans les directions X, Y et Z) / 5G
Altitude Maximum 2000 m au dessus du niveau de la mer
Structure, poids et dimensions « Tray structure rear mounting type » Approx. 0.5 kg 45x160x95 mm
Fonctions
Vitesse de rotation de 0 à 4500 t/min
Résolution (PPR) 10000 32768
Processus de régénération Résistance régénérative (en option)
Contrôle frein de maintien Interne
Fonctions de protection
Erreurs tension d’alimentation & régénération, sur-vitesse, erreur codeur, « Wrap around », erreur CPU, arrêt surcharge,
erreur retour à zéro, erreur mémoire non volatile, dépassement compteur déviation, erreur d’initialisation, dépassement
courant, surchauffe variateur, erreur servo, anormalité de pression, anormalité de communication, etc
Afchage Afchage 2 x LED 7SEG
Boutons Opérateur Moteur associé (reconnaissance automatique codeur absolu), conduite de la course, adresse noeud, contrôle frein de maintien
Interface
Couche physique / Protocole 100BASE-TX / IEEE802.3 compatible Ethernet
Vitesse de transmission 100 Mbit/s Full duplex
Port comm. / Topologie 2 ports (RJ45) / en ligne (max. 65535 noeuds)
Prol matériel CoE CANopen over EtherCAT (IEC61800-7-201), FoE File over EtherCAT (code d’accès ASCII)
Synchronisation Synchronisation SM2, synchronisation DC (SYNC0 / SYNC1), asynchrone, temps de cycle: 1 ms
Signaux
Entrée / sorties
Signaux d’entrées Photo coupler de 5 à 24 VDC - Fins de course positif et négatif, entrée prise d’origine par axe
Signaux de sorties Open collector, 30 VDC/15 mA max. - 2 sorties générales (par axe)
Configuration du système
Spécifications générales
Applications cibles
http://www.sanyodenki.eu
P.A. PARIS NORD II 48 Allée des Erables-VILLEPINTE BP. 57286 F-95958 ROISSY CDG CEDEX France Phone : + 33 1 48 63 26 61
NPI0077_RevA_fr
1
/
2
100%