Équations différentielles

13 Équations différentielles
« A mathematician is a device for turning coffee into theorems. »
Alfréd Rényi (1921-1970)
Plan de cours
I Équations différentielles linéaires scalaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
A Équations différentielles linéaires d’ordre 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 1
B Équations différentielles linéaires d’ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . 3
II Systèmes d’équations linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
A Définition et propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
B Résolution de l’équation homogène X0=AX . . . . . . . . . . . . . . . . . . . . . . . . 7
C Résolution de l’équation avec second membre X0=AX +B. . . . . . . . . . . . . . . . 11
I – Équations différentielles linéaires scalaires
On ne s’intéressera ici qu’aux équations différentielles linéaires d’ordre 1 et d’ordre 2.
A – Équations différentielles linéaires d’ordre 1
On considère l’équation différentielle linéaire d’ordre 1 suivante et l’équation homogène associés :
a(t)y0+b(t)y=c(t) (E)
a(t)y0+b(t)y=0(H)
Elle est dite résolue lorsqu’elle est sous la forme y0+b(t)y=c(t).
On suppose que a,b,c:I→Rsont continues sur un intervalle I de R.
Théorème 13.1 : Problème de Cauchy
Si ane s’annule pas sur l’intervalle I, le problème de Cauchy
a(t)y0+b(t)y=c(t)
y(t0) = y0
admet une unique solution sur I.
En particulier, toute solution d’une équation de la forme
y0
(
t
) +
b
(
t
)
y
(
t
) = 0 qui s’annule une fois sur un
intervalle donné y est automatiquement entièrement nulle!
Théorème 13.2 : ÉD linéaire d’ordre 1
•
L’équation homogène
y0
+
f
(
t
)
y
=0 admet pour solution générale
t7→ λe−F(t)
où
F
est une
primitive de fsur Iet λ∈R.
•
L’équation
y0
+
f
(
t
)
y
=
b
(
t
)admet pour solution générale
t7→ y0
(
t
) +
λe−F(t)
où
y0
est une
solution particulière de l’équation avec second membre.
Méthode pour retrouver la formule rapidement (à prendre avec des pincettes!)
y0=−f(t)y⇐⇒ dy
dt=−f(t)y⇐⇒ dy
y=−f(t)dt
–1–

CHAPITRE 13. ÉQUATIONS DIFFÉRENTIELLES
et donc, en intégrant chaque membre de l’égalité,
ln y(t) = −F(t) + k,k∈R
et on trouve :
y(t) = λe−F(t)avec λ=ek
Corollaire 13.3 : Structure de l’ensemble des solutions
Lorsque
a
:
I→R
ne s’annule pas sur l’intervalle
I
, l’ensemble
SH
des solutions de (
H
)est une droite
vectorielle.
En effet, d’après ce qui précède et en conservant les mêmes notations,
SH=Vectt7→ e−F(t)et SE=y0+Vect t7→ e−F(t)
Exercice 1
Datation au carbone 14
La matière radioactive perd par unité de temps une proportion constante
k
de sa masse ce qui conduit à
l’équation
dm
dt
(
t
) =
−km
(
t
). Sachant que la période
1
du carbone 14 est de 5500 ans et qu’on a retrouvé
des ossements d’origine humaine ne contenant que 0
,
002% de la proportion habituelle, de quand datent
les ossements?
Pour résoudre une équation différentielle linéaire du premier ordre, on se ramènera toujours au plan de
résolution suivant :
ÊIdentification de l’équation.
ËMise sous forme résolue en divisant par a(t)sur les intervalles où ane s’annule pas.
Ex. : t y0−t2y+sin t=0. On résoudra l’équation y0−t y +sin t
t=0 sur R∗
+et sur R∗
−.
ÌRésolution de l’équation homogène : y0=f(t)yavec fcontinue sur l’intervalle de résolution I.
La solution générale de l’équation homogène est
y
(
t
) =
λeF(t)
où
F
est une primitive de
f
sur
I
et
λ∈R.SH=Vect(t7→ eF(t)).
ÍRésolution de l’équation avec second membre.
On recherche pour cela une solution particulière y0de (E).
S’il n’y a pas de solution évidente, on utilisera la méthode de la variation de la constante en cherchant
ysous la forme y(t) = λ(t)eF(t). En réinjectant ydans l’équation, on obtient une expression de λ0
que l’on peut généralement intégrer.
La solution générale de l’équation (E)est y(t) = λeF(t)+y0(t). On a SE=y0+SH.
Ex. : Résoudre y0−x y =xen cherchant une solution particulière de deux façons différentes.
ÎRaccordement éventuel des solutions.
Ex. : y0+a(x)y=b(x)avec y1solution sur R∗
−et y2solution sur R∗
+.
La fonction
y7→ y1(x)si x<0
y2(x)si x>0
est solution de l’équation sur
R∗
. Elle est solution sur
R
si son
prolongement par continuité est également dérivable, ce qui nous conduit à deux conditions :
lim
x→0−y1(x) = lim
x→0−y(x) = lim
x→0+y(x) = lim
x→0+y2(x)
lim
x→0−y0
1(x) = lim
x→0−y0(x) = lim
x→0+y0(x) = lim
x→0+y0
2(x)
ÏConditions initiales.
–2–

Mickaël PROST Lycée Chaptal – PT*
Exemple
Résoudre sur Rl’équation différentielle (E):t y0+|t|y=t2e−|t|.
• Résolution de l’équation sur R∗
+
(E)⇐⇒ t y0+t y =t2e−t⇐⇒ y0+y=te−t
On trouve y(t) = t2
2+C1e−toù C1∈R.
• Résolution de l’équation sur R∗
+
(E)⇐⇒ t y0−t y =t2e−t⇐⇒ y0−y=tet
On trouve y(t) = t2
2+C2etoù C2∈R.
• Recollement des solutions
Supposons que
y
est solution sur
R
de l’équation (
E
). L’application
y
est donc dérivable sur
R
et il
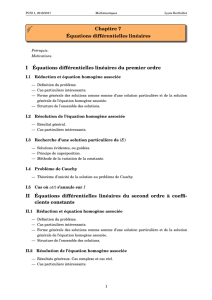
existe deux constantes C1,C2∈Rtelles que :
∀t∈R∗y(t) =
t2
2+C1e−tsi t>0
t2
2+C2etsi t<0
Cela donne a priori de très nombreuses solutions! On peut en visualiser certaines sur le graphe suivant :
t
y
-5 -4 -3 -2 -1 0 1 2 3 4 5
-4
-2
2
4
y
étant continue en 0,
lim
t→0+y
(
t
) =
C1
=
C2
=
lim
t→0−y
(
t
).
y
étant par ailleurs dérivable en 0,
lim
t→0+
y(t)−C1
t
=
C1
=
−C1
=
lim
t→0−
y(t)−C1
t
. Ainsi,
C1
=0 et on trouve une unique solution va-
lable sur R:y(t) = t2
2e−|t|.
B – Équations différentielles linéaires d’ordre 2
On considère l’équation différentielle linéaire d’ordre 1 suivante et l’équation homogène associés :
a(t)y00 +b(t)y0+c(t)y=d(t) (E)
a(t)y00 +b(t)y0+c(t)y=0(H)
De telles équations apparaissent souvent en physique.
Exemple
Pendule simple : ¨
θ+ω2
0sinθ=0 avec ω0=qg
l.
Pour des oscillations faibles, sin θ≈θ, on « peut » considérer que θvérifie l’équation ¨
θ+ω2
0θ=0.
–3–

CHAPITRE 13. ÉQUATIONS DIFFÉRENTIELLES
Exemple
Circuit RLC : q
C+Rdq
dt+Ld2q
dt2=U(t).
On suppose que a,b,c,d:I→Rsont continues sur un intervalle I de R.
Théorème 13.4 : Problème de Cauchy
Si ane s’annule pas sur l’intervalle I, le problème de Cauchy
a(t)y00 +b(t)y0+c(t)y=d(t)
y(t0) = y0;y0(t0) = y0
0
admet une unique solution sur I.
On ne s’intéresse dans ce chapitre qu’à la résolution de cette équation pour des coefficients constants.
On écrit (E)désormais sous la forme :
a y00 +b y0+c y =d(t) (E)
Le résultat suivant est démontré dans la partie II.
Théorème 13.5 : Équa. diff. linéaire d’ordre 2 homogène à coeff. constants
On considère l’équation a y00 +b y0+c y =0.
On résout l’équation caractéristique aX 2+bX +c=0 de discriminant associé ∆.
• Si ∆>0, deux racines réelles distinctes r1et r2.y(t) = λ1er1t+λ2er2tavec λ1,λ2∈R.
• Si ∆=0, une racine réelle double r.y(t) = (λ1+λ2t)ert avec λ1,λ2∈R.
• Si ∆<0, deux racines complexes conjuguées α±iβ.
y(t) = (λ1cos(βt) + λ2sin(βt))eαtavec λ1,λ2∈R.
Comme dans le cas des équations différentielles linéaires d’ordre 1, l’ensemble des solutions de l’équation
a
(
t
)
y00
+
b
(
t
)
y0
+
c
(
t
)
y
=
d
(
t
)est obtenu en recherchant une solution particulière de cette équation.
Théorème 13.6 : Structure de l’ensemble des solutions
Lorsque
a
:
I→R
ne s’annule pas sur l’intervalle
I
, l’ensemble
SH
des solutions de (
H
)est un plan
vectoriel. Toute solution de (
E
)est la somme d’une solution particulière et de la solution générale de
l’équation homogène.
Exercice 2
Résoudre les équations différentielles suivantes :
y00 +3y0+2y=0 ; y00 −2y0+y=0 ; y00 −2y0+5y=0
On peut déterminer une solution particulière de (E)lorsque le second membre d(t)est de la forme :
•d
(
t
) =
P
(
t
)avec
P
un polynôme de degré
n
. On cherche alors une solution sous la forme d’un
polynôme Qde même degré que P.
Ex. : y00 −2y0+y=t2.
•d
(
t
) =
P
(
t
)
emt
avec
P∈R
[
X
], on cherche
y0
sous la forme
y0
(
t
) =
Q
(
t
)
emt
avec
Q∈R
[
X
]
et
deg
(
Q
) =
deg
(
P
) +
k
,
k
étant l’ordre de multiplicité de
m
en tant que racine de l’équation
caractéristique.
•d(t) = cos(ωt),sin(ωt), on passe en complexe et on retrouve le cas précédent 2.
2. Si iωn’est pas racine de l’équation caractéristique, y0(t) = Acos(ωt) + Bsin(ωt).
–4–

Mickaël PROST Lycée Chaptal – PT*
Proposition 13.7 : Principe de superposition
Si
y1
est solution de l’équation
a y00
+
b y0
+
c y
=
d1
(
t
)et
y2
de l’équation
a y00
+
b y0
+
c y
=
d2
(
t
)
alors y1+y2est solution de l’équation a y00 +b y0+c y =d1(t) + d2(t).
Le plan de résolution est exactement le même que celui décrit pour les équations différentielles linéaires
d’ordre 1.
Lorsque l’équation n’est pas à coefficients constants, il n’y a pas de méthode de résolution systématique.
Voici cependant quelques techniques à connaître. On se laissera guider par l’énoncé dans la plupart des cas.
•Recherche de solutions à l’aide de séries entières
Exemple
Résolvons l’équation (
x2
+
x
)
y00
+ (3
x
+1)
y0
+
y
=0 en posant
y
(
x
) =
+∞
X
n=0
anxn
puis en dérivant
terme à terme la somme de la série entière sur l’intervalle ouvert de convergence (inconnu pour le
moment). On trouve, en injectant dans l’équation,
+∞
X
n=2
n(n−1)anxn+
+∞
X
n=2
n(n−1)anxn−1+
+∞
X
n=1
3nanxn+
+∞
X
n=1
nanxn−1+
+∞
X
n=0
anxn=0
⇐⇒
+∞
X
n=2
n(n−1)anxn+
+∞
X
n=1
(n+1)nan+1xn+
+∞
X
n=1
3nanxn+
+∞
X
n=0
(n+1)an+1xn+
+∞
X
n=0
anxn=0
⇐⇒
+∞
X
n=0
[n(n−1)an+ (n+1)nan+1+3nan+ (n+1)an+1+an]xn=0
⇐⇒
+∞
X
n=0
(n+1)2(an+1+an)xn=0
Par unicité du développement en série entière, on trouve
an+1
=
−an
quel que soit
n∈N
, c’est-à-dire
an= (−1)na0. Ainsi, y(x) =
+∞
X
n=0
a0(−x)n=a0
1+x.
On obtiendra systématiquement des solutions sur un intervalle centré en 0. Toutes les solutions de
l’équation n’étant pas nécessairement développables en série entière, il se peut que l’on obtienne qu’une
partie des solutions. Dans l’exemple précédent, il y a bien une infinité de solutions mais les solutions
développables en série entière ne forment qu’une droite vectorielle.
•Recherche de solutions de type polynomiales
On pourra commencer par rechercher le degré d’une fonction polynomiale éventuellement solution, des
conditions sur son coefficient dominant, sur ses racines...
Exemple
Considérons l’équation différentielle x(x+1)y00 + (x+2)y0−y=0.
Posons P=
n
X
i=0
aiXiavec n=deg(P), c’st-à-dire an6=0.
Si
n6
=0, le terme dominant
3
de
x
(
x
+1)
P00
(
x
) + (
x
+2)
P0
(
x
)
−P
(
x
)est (
n2−
1)
anxn
, donc
n¶
1.
On peut donc poser
P
(
x
) =
ax
+
b
et en injectant dans l’équation on trouve
b
=2
a
, c’est-à-dire
P(x) = a(x+2).
•Factorisation par une solution déjà connue (méthode dite de Lagrange)
Cette technique s’apparente à méthode de variation de la constante. Si on connaît une solution
y0
de
l’équation différentielle, on peut chercher une solution sous la forme y=y0z.
–5–
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%