Système commandé en chaîne fermée
publicité

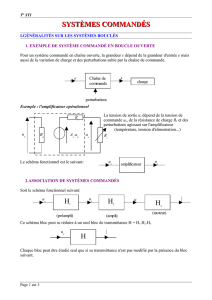
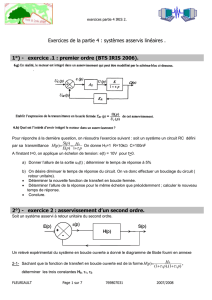
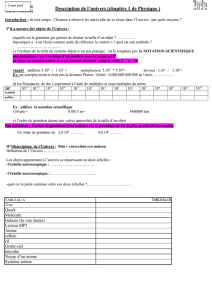
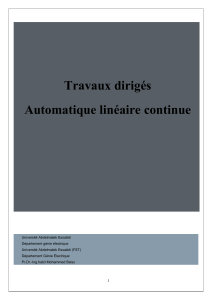
B.1.5 Notions de systèmes commandés en boucle fermé 1°) Systèmes commandés 1.1) Exemple Un moteur à excitation séparée, il peut-être commandé par la tension u appliquée à l’induit et la grandeur de sortie peut-être la vitesse angulaire. 1.2) Cas général Tout dispositif, pour lequel le réglage d’une grandeur d’entrée E permet l’obtention d’une grandeur de sortie S ne dépendant, en principe, que de E est un système commandé. On symbolise ce dispositif par un schéma unifilaire. E S T 1.3) Fonction de transfert Un système réel est modélisé par un système linéaire, qui est en général très proche. S=T.E avec T : fonction de transfert ou transmittance 2°) Système commandé en chaîne ouverte 2.1) Exemple Le hacheur série permet d’alimenter le moteur M sous une tension réglable, donc il permet d’ajuster sa vitesse de rotation. LB i U0 us Charge M Schéma unifilaire: hypothèse i = I = 0 A Le rapport cyclique = k1 uc avec uc tension de commande. Usmoy = et Usmoy = Bernaud J 1/3 B.1.5 Notions de systèmes commandés en boucle fermé Détermination de la transmittance de la chaîne : donc est proportionnelle à uc. En réalité, nous avons négligé la chute ohmique RI, nous avons donc Pour une valeur de déterminée, si la charge croît (le couple résistant augmente), I augmente, donc K diminue car U0 reste constant. Par conséquent le moteur ralentit lorsque sa charge augmente, il faut provoquer une croissance de uc pour faire croître. 2.2) Insuffisance de la chaîne ouverte On voit que pour rendre cette correction automatique de la vitesse en tenant compte de I, il faut corriger la tension de commande . Il faut ainsi adjoindre au système précédent un ou des autres éléments permettant de contrôler . 3°) Système asservi en système bouclé La chaîne précédente est appelée chaîne directe. L’élément permettant la correction automatique est appelé chaîne de retour. 3.1) Chaîne de retour Cette chaîne de retour peut-être fait par une dynamo-tachymètrique. 3.2) Opérateur de différence Il peut-être constitué par un amplificateur de différence entre la tension de retour et la tension d’entrée ( valeur de consigne) correspondant à la vitesse souhaitée. Bernaud J 2/3 B.1.5 Notions de systèmes commandés en boucle fermé Exemple de montage: ue: tension d’erreur uc + ur 3.3) Schéma fonctionnel de la boucle fermée Chaîne directe uc ue grandeur de consigne H grandeur de retour us grandeur de sortie ur K Chaîne de retour 3.4) Transmittance en boucle fermée HK : fonction de transfert en boucle ouverte. Si 1 HK 1 On a un système en contre-réaction ( réaction négative), on fera de la régulation, le système sera stable. Si 1 HK 1 On a une réaction positive, le système ne sera pas stable on aura un oscillateur. 4°) Transmittance complexe Si les grandeurs sont sinusoïdales et tous les éléments linéaires, on peut définir des transmittances complexes et donc la transmittance complexe en boucle fermée. Bernaud J 3/3