Systèmes d`exploitation Chapitre 4: Gestion des périphériques

Université Cadi Ayyad
Faculté Polydisciplinaire de Safi
Département sciences mathématiques et informatique
Systèmes d'exploitation
Chapitre 4: Gestion des périphériques
Année universitaire: 2010-2011
ContrôlerContrôler lesles périphériquespériphériques d’entrée/sortied’entrée/sortie:: émettre des commandes
vers ces périphériques, intercepter les interruptions et gérer les
erreurs,, estest l’unel’une desdes principalesprincipales fonctionsfonctions d’und’un systèmesystème d’exploitationd’exploitation

Plan du cours
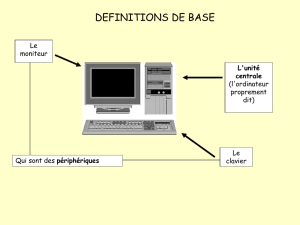
●Gestion des périphériques
–Organisation générale;
–Les périphériques;
–Entrées-Sorties physiques;
–La synchronisation microprocesseur des E/S.
●
Les interruptions;
●
Les interruptions;
●Le pilote des périphériques;
●Les tampons.

Gestion des périphériques
●Introduction:
la gestion des E/S consiste en la gestion du transfert
d’information entre le couple unité centrale
microprocesseur - mémoire et l’extérieur soit les unités
périphériques locales ou distante.
Dans un système d’exploitation, cette fonction est
réalisée
par
un
ensemble
de
services
appelé
réalisée
par
un
ensemble
de
services
appelé
gestionnaire d’entrée-sortie.

Gestion des périphériques
●Organisation générale: L'évolution des ordinateurs a
conduit à accroître l'autonomie des organes d'entrées-
sorties et à leur confier des fonctions de plus en plus
complexes d'enchaînement et de commande, le
microprocesseur ne gardant que l'initiative du
lancement et du contrôle des opérations. Il existe
plusieurs organisations ou branchement des
périphériques
au
microprocesseur
.
périphériques
au
microprocesseur
.

Gestion des périphériques
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%