Traité d`électricité : analyse et synthèse des systèmes logiques

CHAPITRE
1
MODES
DE
REPRÉSENTATION
DES
SYSTÈMES
COMBINATOIRES
1.1
MODÈLES
LOGIQUES
1.1.1
Introduction
Trois
hypothèses
simplificatrices
permettent
de
décrire
certains
systèmes
concrets
à
l'aide
de
grandeurs
dépendant
du
temps
et
n'ayant
que
deux
états
physiques
distincts.
Le
chapitre
1
est
consacré
à
l'étude
d'éléments
dont
les
états
de
sortie
dépendent
unique-
ment
des
états
d'entrée
mesurés
au
même
instant.
On
définit
la
fonction
logique
d'un
tel
élément
comme
étant
le
tableau
de
correspondance
entre
les
états
d'entrée
et
les
états
de
sortie;
divers
modes
de
représentation
de
ces
fonctions
sont
introduits
:
tables,
diagram-
mes
de
Venn
et
expressions
algébriques.
L'algèbre
logique
introduite
à
cet
effet
repose
sur
un
nombre
restreint
de
postulats
dont
il
découle
des
théorèmes
qui
sont
démontres
et
illustrés
par
des
applications
pratiques.
1.1.2
Définition
On
appelle
système
concret
tout
objet
physique
comportant
un
nombre
fini
d'ac-
cès
ou
bornes;
certaines
d'entre
elles
sont
les
bornes
d'entrée,
les
autres
sont
les
bornes
Fig.
1.1
GND
=
0v

2
ANALYSE
ET
SYNTHÈSE
DES
SYSTÈMES
LOGIQUES
de
sortie
et
l'état
physique
des
premières
détermine
de
façon
plus
ou
moins
complexe
l'état
des
secondes
en
fonction
du
temps.
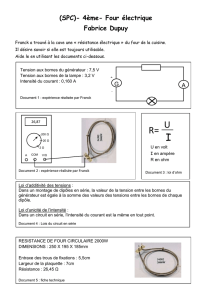
1.1.3
Exemple
Le
schéma
électronique
de
la
figure
1.1
présente
un
système
concret
comportant
deux
bornes
d'entrée
(désignées
par
1
et
2)
et
une
borne
de
sortie
(désignée
par
3).
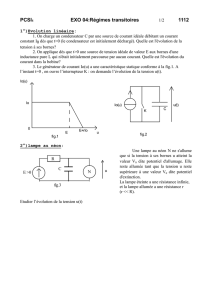
1.1.4
Expérience
La
figure
1.2
décrit
la
variation
en
fonction
du
temps
t
des
tensions
électriques
xl(t)'x2(t)
etx3(t)
mesurées
entre
les
trois
bornes
du
schéma
de
la
figure
1.1
et
la
terre;
ce
diagramme
temporel
ou
chronogramme
constitue
le
protocole
d'une
expérience.
On
constate
que
:
•
les
tensions
d'entrée
x\
et
x^
ne
prennent
au
cours
du
temps
que
deux
états
physiques
distincts
:
0V
et
+5V;
ces
deux
états
seront
simplement
désignés
par
les
symboles
0
et
1
;
•
la
tension
de
sortie
x^
varie
de
façon
continue
et
prend
au
cours
du
temps
une
infinité
d'états
physiques
distincts.
•
%^
x,(t)
0
^«^
X,(t)
0
//W
V,
Y
It)
va
Xi(t)
—————
1
2
————
X,
(t)
0
————
1
X(t)
o
Y(t)
0
————
Z(t)
Q
Y-
AO.
-
A|—
^
^
^i
A
:^^^
W/M.
A,o
A
A
/
01
/
Fig.
1.2
1.1.5
Commentaire
Pour
décrire
le
comportement
du
système
concret
de
la
figure
1.1,
on
cherche
à
établir
une
relation
entre
les
variations
des
entrées
et
celles
de
la
sortie;
une
telle
relation
serait
facilitée
si
la
tension
de
sortie
x3
se
présentait
sous
la
forme
des
tensions
d'entrée

MODES
DE
REPRÉSENTATION
DES
SYSTÈMES
COMBINATOIRES
3
X1
ou
x2,
c'est-à-dire
si
elle
ne
comportait
que
deux
états
0
et
1.
L'introduction
de
trois
hypothèses
simplificatrices
permettra
d'aboutir
au
résultat
recherché
:
la
représentation
finale
de
x3
sera
une
traduction
approximative
de
la
réalité
physique
ou
modèle
du
système
concret.
1.1.6
Première
hypothèse
En
admettant
l'existence
de
deux
tensions
constantes
VQ
et
v^
(fig.
1.2)
on
peut
déterminer
à
chaque
instant
une
variable
Xy(t)
définie
de
la
façon
suivante
:
•
X3(t)
=
0
si
xs(t)
<
VQ
•
Xs(t)
=
1
si
xs(t)
>
vi
•
X3(t)
=
2
si
ro
<
X3(t)
<
v,
La
variable
Xy
peut
prendre
trois
valeurs
distinctes
ou
états
:
X^
est
un
signal
discret
ou
quantifié;
la
description
de
^3
par
Xy
est
une
quantification
de
x^.
On
constate
dans
la
figure
1.2
que
l'état
X^
=
2
apparaît
transitoirement,
lors
du
pas-
sage
direct
ou
inverse
des
états
Xy
=
0
à
Xy
=
1
:
cette
constatation
suggère
une
deuxième
hypothèse.
1.1.7
Deuxième
hypothèse
En
admettant
que
la
durée
des
variations
des
entrées
est
nettement
supérieure
à
la
durée
de
l'état
transitoire
caractérisé
par
Xy
=
2,
on
peut
négliger
la
représentation
de
cet
état
:
la
variable
X(t)
(fîg.
1.2)
illustre
une
telle
simplification.
On
constate
alors
que
le
signal
X(t)
ne
comporte
que
deux
états
0
et
1
;
on
cons-
tate
également
l'existence
de
retards
ou
délais
séparant
l'action
sur
les
entrées
(variations
de
x\
et
x^)
des
effets
sur
la
sortie
(variations
de
X)
'.
on
remarque
en
particulier
que
le
délai
AOI
lors
d'une
variation
de
A"
de
0
à
1
n'est
pas
égal
au
délai
Aïo
de
la
variation
inverse.
1.1.8
Troisième
hypothèse
En
admettant
que
les
délais
Aoi
et
Aïo
sont
égaux
à
une
constante
A,
indépendante
du
temps,
la
variable
X(t)
peut
être
remplacée
par
une
nouvelle
variable
Y(t)
(fig.
1.2).
1.1.9
Définition
:
modèle
logique
asynchrone
En
admettant
successivement
les
trois
hypothèses
de
la
quantification,
de
l'élimi-
nation
des
transitoires
et
de
l'égalisation
des
délais
on
obtient
un
modèle
particulier
du
système
concret
étudié
:
c'est
le
modèle
logique
asynchrone
auquel
se
réfère
l'ensemble
du
présent
volume.
1.1.10
Définition
:
modèle
logique
combinatoire
En
admettant
que
le
délai
A
de
Y(t)
est
nul,
on
obtient
la
variable
Z(t)
(fig.
1.2)
qui
décrit
un
cas
particulier
très
important
du
modèle
asynchrone
:
c'est
le
modèle
lo-
gique
combinatoire.
1
/
3
100%