Remerciement - Fichier



(S)
(S)

−→
P
−→
N
(S)−→
P+−→
N=−→
0
M
τ= 3 s
−→
P−→
N−→
P+−→
N=−→
0
−→
F(S)m−→
0
−→
F
−→
F=m ⃗a
SI F (N)a
m/s2m kg

τ= 0.3s
τ MRUA
−→
P
∑−→
F=−→
P=m ⃗a ∑−→
F̸= 0
⃗a
⃗g
−→
P=m ⃗g.
g ⃗g g = 9.8m/s2
(S)
MRUA ∑−→
F̸= 0
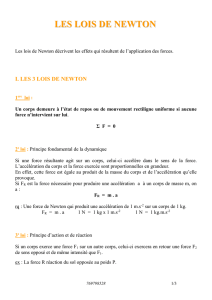
A B −→
FA/B B
A−→
FB/A
−→
FA/B =−−→
FB/A
(A) (B)−→
FA/B
(B) (A)−→
FB/A
 6
7
8
6
7
8
1
/
8
100%