Automatisation et Robotisation de la Production

Chapitre 5:
Fonctions Spéciales
Pierre Duysinx
Université de Liège

Extension des fonctionnalités
Aperçu des principales fonctions spéciales que l’on peut trouver
sur les automates
Logique séquentielle
Base de temps
Opérations sur mots
Contrôle du cycle
Manipulation des données
Régulation PID
Commande d’axe
Ces fonctions sont réalisées
soit par voie logicielle via le processeurs,
soit par voie matérielle c’est-à-dire par un module greffé sur le bus

Extension de la logique de base
Mettre à la disposition du programmeur des fonctions couramment
utilisées dans les automatismes
Bi stables
SR forcé dominant / RS réinitialisé dominant / SEMA sémaphore
Temporisateurs
Impulsion TP / temporisation à l’enclenchement TON / temporisation au
déclenchement TOF / RTC horloge temps réel (date et heure)
Compteurs
Compteur CTU / décompteurs CTD / compteur-décompteur CTUD
Différentiateurs
Détecteurs de front montant R-TRIG ou descendant F-TRIG

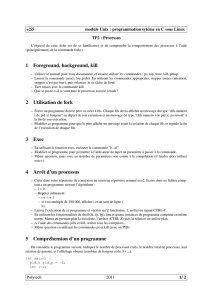
Extension de la logique de base
Mettre à la disposition du programmeur des fonctions couramment
utilisées dans les automatismes
Type
Nom
Explication
Bistables
Détecteur de front
Compteurs
Temporisateurs
SR
RS
SEMA
R-TRIG
F-TRIG
CTU
CTD
CTUD
TP
TON
TOF
RTC
Forcé dominant
Réinitialisé dominant
Sémaphore
Front montant
Front descendant
Compteur
Décompteur
Compteur/Décompteur
Impulsion
Temporisation à l'enclenchement
Temporisation au déclenchement
Horloge temps réel (donne la date et
l'heure du jour)

Temporisation
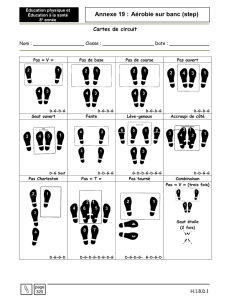
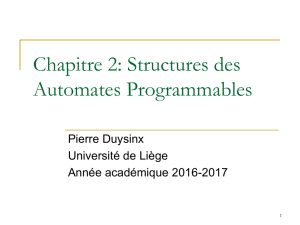
La fonction temporisation
permet de décaler un signal
logique par rapport à un autre
d’un délai fixé.
Décalage à l’enclenchement
ou au déclenchement
Sur les automates modernes la
temporisation est effectuée par
une horloge interne à 100 ms,
parfois à 10 ms
TEMPO
T
E
S
E
S
T
t
t
E
S
T
<
T
t
t T
a. Retard à l'enclenchement b. Retard au déclenchement
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%