1. APPLICATIONS DU COURS D`ELECTRICITE

1. APPLICATIONS DU COURS D’ELECTRICITE ......................................................................................... 2
1.1. LES DEFINITIONS ................................................................................................................................................ 2
1.1.1. Fonctionnement d’un circuit électrique ..................................................................................................... 2
1.1.2. Mesure des grandeurs courants et tensions ............................................................................................... 2
1.1.3. Mesure de puissance aux bornes d’un dipôle ............................................................................................. 2
1.1.4. Valeurs caractéristiques ............................................................................................................................. 3
1.1.5. Les signaux périodiques sinusoïdaux ......................................................................................................... 3
1.1.6. Exercices .................................................................................................................................................... 4
1.2. LES COMPOSANTS DE BASE ................................................................................................................................ 6
1.2.1. Les résistors ............................................................................................................................................... 6
1.2.2. Les condensateurs ...................................................................................................................................... 8
1.2.3. Les inductances .......................................................................................................................................... 9
1.2.4. PROBLEMES ........................................................................................................................................... 10
2. REGULATION, ASSERVISSEMENT .......................................................................................................... 17
2.1. RAPPEL DE COURS ............................................................................................................................................ 17
2.2. LES REGULATEURS ........................................................................................................................................... 18
2.3. EXERCICES ....................................................................................................................................................... 18
3. AUTOMATIQUE LOGIQUE ......................................................................................................................... 29
3.1. INTRODUCTION ................................................................................................................................................ 29
3.2. EXERCICES DE BASE DE LOGIQUE COMBINATOIRE ............................................................................................ 29
4. CORRIGES ...................................................................................................................................................... 30
4.1. EXERCICES D’ ELECTRICITE .............................................................................................................................. 30

1. APPLICATIONS DU COURS D’ELECTRICITE
1.1. Les définitions
1.1.1. Fonctionnement d’un circuit électrique
un circuit électique peut fonctionner de plusieurs façons:
- en régime permanent
- en régime variable
Le régime permanent peut être de type continu ou de type périodique. Dans le cas du régime
permanent continu, les grandeurs tensions et courants sont des grandeurs indépendantes du temps. Dans le cas du
régime permanent périodique, les grandeurs tensions et courants peuvent être alternative ou périodiques à
composante moyenne non nulle.
Une grandeur alternative est une grandeur de valeur moyenne nulle sur une période. Un cas
particulier de ce type de grandeur est une grandeur sinusoïdale.
Le régime variable est un régime quelconque non continu et non périodique.
1.1.2. Mesure des grandeurs courants et tensions
I
A
Générateur V V Récepteur
En convention générateur, le générateur délivre un courant donc tension et courant sont de même sens. Le
récepteur reçoit un courant donc tension et courant sont de sens opposés.
La mesure du courant est de la tension se font respectivement par un ampéremètre et un voltmètre.
L’ampéremètre se monte en série dans le circuit tandis que le voltmètre est monté en parallèle (dérivation).
La visualisation d’une tension est réalisée par l’intermédiaire d’un oscilloscope.
1.1.3. Mesure de puissance aux bornes d’un dipôle
W
i
dipôle
u
La mesure de puissance active se fait par l’intermédiaire d’un wattmètre. Le Wattmètre dispose d’un circuit
tension très résistant appelé également circuit « fil fin » et d’un circuit courant peu résistant appelé circuit « gros
fil ». En effet, on verra par la suite que la valeur de la résistance d’un fil cylindrique est inversement
proportionnelle à son diamètre.
A chaque instant, la puissance électrique produite ou délivrée par le générateur et donc absorbée ou reçue par le
récepteur est donnée par l’expression:
* puissance instantanée p(t) = v(t).i(t) avec p(t) en Watts, i et v en Ampères et en Volts.

Les appareils de mesure peuvent être à aiguille, ils sont alors dits analogiques. Lorsque la valeur
mesurée est directement affichée, l’appareil est numérique. Il existe couramment des appareils de mesure à la
fois numérique et analogique. Certains appareils de mesure numériques sont susceptibles de mesurer les
grandeurs courants, tensions... ce sont des multimètres.
Remarque: dans le cas d’un ampéremètre polarisé, le courant doit traverser l’appareil dans un sens déterminé.
1.1.4. Valeurs caractéristiques
La valeur efficace Veff (ou Ieff) d’une tension (ou d’un courant) est égale à la valeur d’une tension (courant)
continue qui provoquerait le même échauffement dans une même résistance R.
L’expression mathématique de la valeur efficace Xeff d’une grandeur x(t) périodique de période T dans le temps
est donnée par:
Tdttx
T
Xeff
0
2)(
1
La valeur moyenne Vmoy (ou Imoy) d’une tension (ou d’un courant) est donnée par l’expression
mathématiques:
Tdttx
T
Xmoy
0
)(
1
Remarque: dans le cas d’une grandeur constante, la valeur de cette grandeur est égale à la valeur moyenne et à
la valeur efficace de cette grandeur.
La mesure d’une valeur moyenne se fait par l’intermédiaire :
- d’un appareil numérique en position DC
- ou d’un appareil magnétoélectrique (symbole )
- ou par utilisation d’un oscilloscope (mesure en position AC puis en position DC, la translation
verticale corrspond à la valeur moyenne)
La mesure d’une valeur efficace se fait par l’intermédiaire :
- d’un appareil ferromagnétique (symbole ) pour des valeurs de fréquences inférieures à quelques
dizaines d’Hertz)
- d’un appareil numérique RMS (Root Mean Square) en position AC+DC
La valeur efficace d’une grandeur sinusoïdale est égale au quotient de l’amplitude de la sinusoïde par
2
.
Remarque: un appareil numérique RMS en position AC indique uniquement la valeur efficace de l’ondulation
de la grandeur x(t) sans tenir compte de la valeur continue de x(t).
1.1.5. Les signaux périodiques sinusoïdaux
Un signal S(t) est dit périodique lorsqu’il se répéte identiquement à lui-même après une période T, on en
déduit la relation mathématiques:
t , T S(t+T) = S(t)
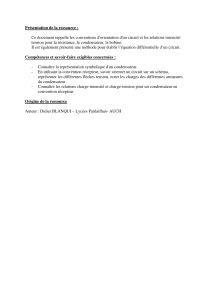
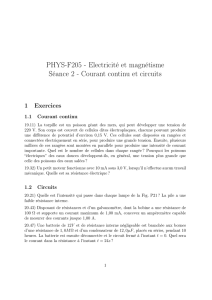
Sur la figure ci-dessous sont réprésentées trois fonctions périodiques particulières: ce sont des fonctions
sinusoïdales.
On peut remarquer que :
* l’amplitude est de 1 V
* l’amplitude crête à crête est de 2 V (1- -1)
* on déduit la valeur efficace
VSeff 707,0
2
1

* la période de chacune des fonctions est de sensiblement 6,3 s => la pulsation est
1
.1
3,6 14,3.2.2
..2
srad
T
f
* la fonction S a pour valeur initiale 0 => S(t) = sin (.t)=sin (t)
* la fonction S1 est de la forme S1(t)=sin(.t+), on peut remarquer que S1 passe par 0 à l’instant 0,8 s (soit
2./8 ou /4) => S1(t) = sin (t - /4)
* la fonction S2 par contre passe par 0 à l’instant -0,8s
=> S2(t) = sin (t+ /4)
* le déphasage de S par rapport à S2 est de 45°, le déphasage de S par rapport à S1 est de -45°.
* S est en retard sur S2 mais en avance sur S1.
S S1 S2
-1,5
-1
-0,5
0
0,5
1
1,5
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
6,5
7
7,5
temps en seconde
S, S1, S2
1.1.6. Exercices
Exercice 1:
Les hacheurs sont des convertisseurs directs de type continu-continu. L’utilisation des hacheurs permet
d’assurer le contrôle des puissances dans des circuits fonctionnant en courant continu. On suppose dans cet
exercice qu’une source de tension continue constante U alimente par l’intermédiaire d’un quadripôle (hacheur)
un moteur à courant continu assimilable à une source de courant constante I.
j K1
+ +
U quadripöle Mcc U K2 I V
- -
1°) Montrer que les deux interrupteurs ne peuvent être fermés simultanément.
2°) Montrer que les deux interrupteurs ne peuvent être ouverts simultanément.
3°) On suppose que les interrupteurs parfaits K1 et K2 ont un fonctionnement simultané et complémentaire.
Quand K1 est ouvert durant to, K2 est fermé et quand K1 est fermé durant tf, K2 est ouvert. La période de
fonctionnement de la cellule de commutation K1, K21 est notée T.
Dessiner les formes d’ondes de la tension V et du courant j.
4°) Déterminer les expressions de la valeur efficace et de la valeur moyenne de la tension V.
5°) Déterminer l’expression de la puissance moyenne fournie au générateur de courant I.
Exercice 2:
On considère une tension u(t) s’exprimant mathématiquement sous la forme u(t)=Um.cos(.t+) et un
courant i(t)=Im.cos(.t+)
1°) Déterminer l’expression de la valeur efficace de u(t) et i(t).

2°) Déterminer la valeur moyenne sur une période de u(t) et i(t).
3°) Donner l’expression de la puissance instantanée et montrer que cette puissance est la somme d’un terme
constant (puissance moyenne ou puissance active) et d’un terme à la pulsation double (puissance fluctuante).
4°) Dans le cas particulier où u(t) a pour valeur efficace 20 V et i(t) à pour valeur efficace 10 A avec =/4 et
i(t) non déphasé par rapport à u(t), représenter l’allure de la puissance instantanée p(t) sur deux périodes. Les
deux grandeurs u(t) et i(t) ont pour fréquence 50 Hz.
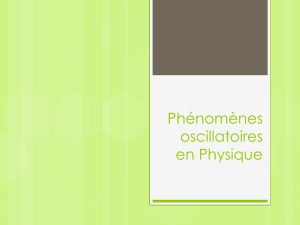
Exercice 3:
Le redresseur simple alternance élémentaire est représenté sur la figure ci-dessous. Il comporte un
transformateur d’isolement de rapport de tranformation égal à 1, une diode que l’on considérera comme parfaite
(bloquée si tension négative à ses bornes, chute de tension nulle dans le sens passant) et une charge résistive R.
Le repérage des sens relatifs des enroulements du transformateur est indiqué par un point. La
conséquence de ce repérage est que si l’on applique aux bornes de l’enroulement primaire une tension positive
côté pointé, les tensions induites aux bornes du secondaire sont également positives côté pointé.
La tension côté primaire du transformateur est
sinusoïdale de fréquence 50 Hz, de valeur efficace E=
220V (valeur nulle à l’instant 0)
1°) Représenter l’allure de la tension côté primaire sur
une période, la tension aux bornes de la charge R sur
une période.
2°) Calculer la valeur moyenne de la tension côté
primaire sur une demi-période.
3°) Calculer la valeur moyenne de la tension aux
bornes de la charge sur une période ainsi que la valeur
efficace.
4°) Comparer les résultats des questions 2 et 3.
Exercice 4:
Sur le montage précédent, on place en parallèle avec la résistance R, un condensateur au tantale de
capacité C. On suppose maintenant que la diode dans le sens passant est équivalente à une résistance rd très
faible devant la résistance R.
A l’instant 0, le condensateur C est déchargé.
1°) La tension côté primaire croit de 0 à Emax, que se passe-t-il au niveau du condensateur C ? Avec quelle
constante de temps, le condensateur se charge-t-il?
2°) La tension côté primaire décroit à partir de Emax, que se passe-t-il au niveau du condensateur C? Avec
quelle constante de temps se décharge-t-il ?
3°) Pourquoi parle-t-on dans le cas de la mise en place du condensateur C de filtrage capacitif ?
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%