Radar ULB optoélectronique à balayage autonome

Radar ULB optoélectronique à
balayage autonome
Romain Négrier, Michèle LALANDE
XLIM, Université de Limoges

Sommaire
1
2
3
4
Radar optoélectronique
Principe du balayage autonome
Test d’une source élémentaire
Algorithme d’imagerie

Sommaire
1
2
3
4
Radar optoélectronique
Principe du balayage autonome
Test d’une source élémentaire
Algorithme d’imagerie

Radar ULB optoélectronique
•Démonstrateur d’un Radar alimenté par des sources optoélectroniques
conçu et testé dans le cadre du PEA ‘RUGBI’ (2003-2006)
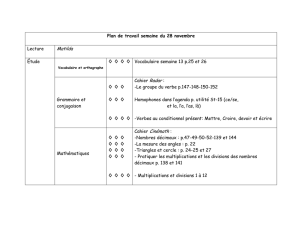
Radar optoélectronique
Générateur d’impulsions
Système d’acquisition
monocoup
Cible
Impulsion incidente
Réponse temporelle
émission
réception
antennes
Alimentation
T.H.T
Faisceau laser
Dispositifs de mise en
forme du signal
intégrant un
photoconducteur
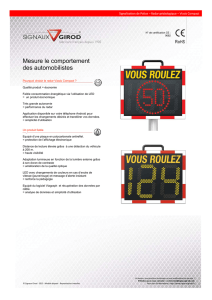
-0.5
0
0.5
1
1.5
2
2.5
-1e-09
-5e-10
0
5e-10
1e-09
1.5e-09
2e-09
2.5e-09
3e-09
3.5e-09
4e-09
Amplitude / V
Temps / s
Photoswitch 1
Photoswitch 2
Photoswitch 3
Photoswitch 4
2 ns
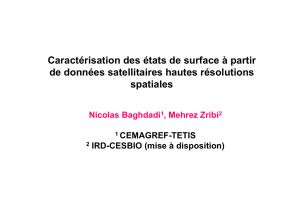
0
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
1.46e-07
1.465e-07
1.47e-07
1.475e-07
1.48e-07
1.485e-07
1.49e-07
1.495e-07
1.5e-07
1.505e-07
1.51e-07
Amplitude / V
Temps / s
Réseau de 4 antennes
Réseau de 2 antennes seules
1 antenne seule
Signal électrique
photogénéré
Synchronisation
des rayonnements
Tension reçue

Radar ULB optoélectronique
•Démonstrateur d’un Radar alimenté par des sources optoélectroniques
conçu et testé dans le cadre du PEA ‘RUGBI’
Radar optoélectronique
Générateur d’impulsions
Système d’acquisition
monocoup
Cible
Impulsion incidente
Réponse temporelle
émission
réception
antennes
Alimentation
T.H.T
Faisceau laser
Dispositifs de mise en
forme du signal
intégrant un
photoconducteur
Après RUGBI, dans le cadre de REI
•Diminution de la taille des
antennes
•Optogénération d’une impulsion
électrique adaptée à la bande
passante de l’antenne
•Balayage par retard optique
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%