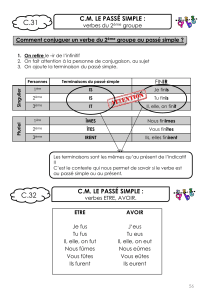
Modélisation par éléments finis de circuits

Modélisation par éléments finis de
circuits magnétiques non linéaires
alimentés par de
l’électronique de puissance
Patrick Dular, Dr. Ir., Chercheur qualifié F.N.R.S.
Dept. of Electrical Engineering - University of Liège - Belgium
Circuits avec
commutateurs
électroniques
Modèles
éléments finis
Couplage
1

2
Problèmes physiques couplés
dans les systèmes électromagnétiques
Développement d’un environnement logiciel de
modélisation de problèmes couplés
•Couplage avec circuits électriques et électroniques
e.g., avec alimentation d’électronique de puissance
•Couplage mécanique
calcul de force
magnétostriction, piézoélectricité
bruit et vibrations
•Couplage thermique
pertes thermiques (balance entre pertes et refroidissement)
chauffage par induction
Caractérisation des propriétés matérielles
•non linéarités, anisotropies, hystérésis

3
Modélisation numérique (1)
Modèles physiques
•magnétostatique, magnétodynamique
•électrostatique, électrodynamique
•électrocinétique
•propagation électromagnétique
•circuits électriques et électroniques à éléments localisés
•problèmes mécaniques, mouvement de parties rigides, élasticité
•vibrations et bruit, acoustique
•problèmes thermiques
Méthodes numériques
•méthode des éléments finis
•méthodes intégrales
•méthode des éléments frontière

4
Modélisation numérique (2)
Modèles géométriques
•1D
•2D, plan et axisymétrique
•3D
Régimes temporels
•régime statique
•domaine fréquentiel: régimes harmonique et multi-harmonique
•domaine temporel: régime transitoire, schémas d’intégration temporel
divers
Modèles de matériaux
•matériaux non-linéaires et anisotropiques
•modèles d’hystérésis

Equations de Maxwell
curl h= j+∂td
curl e= – ∂tb
div b= 0
div d= ρ
b= µh
j= σe
d= εe
Relations constitutives
Equations Conditions limites Conditions globales
pour couplage circuit
n × h⏐Γh = 0 , n ⋅ b⏐Γe = 0
Inducteur
Tension Courant
i
Vd
i=⋅
∫
γle it Ids)(
i
j=∂+⋅
∫
Γdjn
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%