AP13 corrigée - cours

AP13 - MECANIQUE DE NEWTON
EXERCICE 1 :
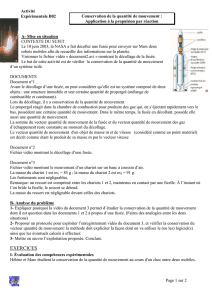
Les trajectoires, vecteurs vitesse et accélération
du centre d’inertie sont représentés ci-dessous :
1. En justifiant, indiquer les situations où les
vecteurs sont bien représentés.
2. Pour les bonnes représentations, préciser la
nature du mouvement du centre d’inertie de la
balle.
EXERCICE 2 :
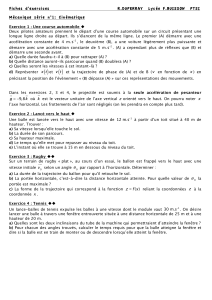
Le schéma suivant représente, à l’échelle 1 cm 0,20 m.s1,
les vecteurs du centre d’un mobile autoporteur aux dates
tk = k.t, avec t = 30 ms.
Effectuer la construction graphique du vecteur accélération
a2
à l’échelle 1 cm 10 m.s2. Détailler les différentes
étapes.
EXERCICE 3 :
Le biathlon est une épreuve combinant ski de fond et tir à la carabine.
On étudie un aspect du parcours d'un athlète de masse M = 75,0 kg portant une
carabine de masse mc = 4,0 kg. Lors du tir, une balle de masse mb = 5,0 g est
expulsée de la carabine avec une vitesse vb = 310 m.s1. La balle doit atteindre
l'une des cinq cibles disposées sur un support.
1. Calculer la quantité de mouvement de la balle à la sortie du canon.
2. On ne tient pas compte des gaz éjectés et on suppose que le système
constitué de la carabine et de la balle est pseudo-isolé avant et après le tir.
2.1. Montrer que le vecteur quantité de mouvement reste constant avant et
après le tir ?
2.2. Calculer la valeur de la vitesse de recul de la carabine.
3. En réalité, l'athlète tient fermement la carabine en appui sur son épaule.
Comment est modifié le raisonnement précédent dans ce cas ?
4. La balle arrive à la vitesse horizontale v
sur l'une des cinq cibles noires.
Sous l'impact de la balle, la cible noire se déplace puis active un mécanisme
qui fait basculer un cache blanc devant la cible. Le tireur sait ainsi qu'il a
réussi son tir. En supposant pseudo-isolé le système constitué par la cible
noire et la balle incrustée, calculer sa vitesse v' juste après l'impact.
Données :
v = 300 m.s1 ; masse de la cible noire mcib1e = 60 g.
Epreuve de tir au biathlon
Déplacement de la cible sous
l’impact d’une balle
EXERCICE 4 :
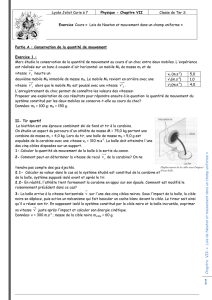
Une partie de curling se déroule en trois phases de mouvement.
Première phase:
un joueur pousse un bloc en granite sur la glace puis le
lâche en vue d'atteindre une cible dessinée sur la glace.
Deuxième phase : à
l'aide de balais, ses co-équipiers frottent la glace
devant le bloc pendant son déplacement; le bloc va alors en ligne droite
et sa vitesse est constante.
Troisième phase :
dès que le bloc est proche de la cible, les co-
équipiers cessent d'intervenir; le bloc ralentit puis s'arrête.
1. Énoncer les trois lois de Newton.
2. Pour les trois phases du mouvement du bloc :
- décrire le mouvement de ce dernier dans le référentiel terrestre considéré comme galiléen.
- faire l'inventaire des forces qu'il subit.
- représenter ces forces sur un schéma sans souci d'échelle mais conformément aux lois de Newton.
a
v
v
a
v
a
v
a
M1
M2
M3
v3
v1
cible
mécanisme
cache

CORRECTION AP 13
EXERCICE 1 :
1. Le vecteur vitesse doit être
- tangent à la trajectoire au point considéré
- orienté dans le sens du mouvement.
Le vecteur accélération est :
- dirigé vers l'intérieur de la trajectoire dans le cas d’un mouvement circulaire ;
- tangent à la trajectoire dans le cas d’un mouvement rectiligne.
Les représentations et sont correctes.
En , le vecteur vitesse n’est pas dans le sens du mouvement.
En , le vecteur vitesse n’est pas tangent à la trajectoire et le vecteur accélération n’est pas dirigé vers
l’intérieur de la courbe.
2. En , le mouvement est rectiligne (la trajectoire est une droite) et ralenti car le vecteur accélération est dans
le sens opposé au mouvement.
En , le mouvement est circulaire (la trajectoire est un arc de cercle) accéléré puisque l’angle entre les deux
vecteurs est inférieur à 90° ( a
. v
0).
EXERCICE 2 :
1. Par définition, le vecteur accélération : a2
= v2
2.t = v3
– v1
2.t
Le tracé du vecteur v2
= v3
v1
est représenté ci-contre.
Sur le schéma, v2
a une longueur de 1,8 cm.
1 cm 0,20 m.s 1 Grâce à l’échelle de représentation des vitesses, on calcule sa norme
1,8 cm v2
v2
= 1,8 x 0,20
1 = 0,36 m.s–1
La norme de l’accélération a2
se calcule grâce à la formule : a2
= v2
2.t d’où a2
= 0,36
2 x 30.10–3 = 6,0 m.s–2
Grâce à l’échelle de représentation des accélérations, on en déduit que la longueur de a2
est = 0,60 cm, ce qui
permet de le tracer selon la direction et le sens de v2
(voir construction graphique ci-dessus).
En effet : 1 cm 10 m.s 2
(cm) 6,0 m.s 2
EXERCICE 3 :
1. La quantité de mouvement de la balle est : pb
= mb .vb
Ainsi : pb = mb .vb = 5,0.103 310 = 1,6 kg.s 1.
2.1. Le système {carabine + balle} est supposé pseudo-isolé, le vecteur quantité de mouvement est donc constant.
2.2. La conservation de la quantité de mouvement du système permet de déterminer la vitesse de recul.
Avant le tir: le système étudié {carabine + balle} est immobile, la quantité de mouvement est donc nulle: pavant
= 0
Après le tir: la quantité de mouvement du système est la somme des quantités de mouvement de la balle et de la
carabine: paprès
= pb
+ pc
Dans le référentiel terrestre supposé galiléen, la conservation de la quantité de mouvement s'écrit: pavant
= paprès
soit pb
+ pc
= 0
On en déduit: pC
= pb
soit mc .vc
= mb .vb
et vc
= – mb
mc.vb
La vitesse de recul de la carabine a donc la même direction mais un sens opposé à la vitesse de la balle et :
vc = mb
mc.vb = 5,0.10–3
4,0 x 310 = 0,39 m.s–1
3. Le raisonnement reste identique lorsque la carabine est correctement épaulée mais le système à considérer
comprend alors l'athlète, soit {athlète + carabine + balle}. La masse totale du système est plus grande que dans
le cas précédent et la vitesse de recul est plus faible.
M1
M2
M3
v3
v3
v1
- v1
v2
a2

4. Avant l'impact, la quantité de mouvement du système {balle + cible} s'écrit: p'avant
= mb . v
Après l'impact: p'après
= (mb + mcible ) v’
En effet, la balle étant incrusté dans la cible, celles-ci se déplacent à la même vitesse v’.
La conservation de la quantité de mouvement : mb .v = (mb + mcib1e).v' donc v' = mb.v
mb+mcible = 5,0.10–3 x 300
5,0.10–3 + 60.10–3 = 23 m.s–1 .
EXERCICE 4 :
1. Voir le cours pour l’énoncé des lois de Newton.
2.
Première phase du mouvement
:
Le mouvement est rectiligne et accéléré. La somme des forces est donc horizontale
et dans le même sens que l’accélération c’est-à-dire dans le sens du mouvement.
Le palet subit :
• son poids P
vertical et vers le bas,
• la réaction normale de la glace R
verticale et vers le haut,
• la force de frottements f
de la glace horizontale et opposée au mouvement,
• la force exercée par le joueur F
horizontale et dans le sens du mouvement.
Deuxième phase du mouvement
:
Le mouvement est rectiligne et uniforme. La somme vectorielle des forces est
donc nulle. Ces forces sont donc représentées par des vecteurs de même longueur,
de même direction mais de sens contraire.
Les forces subies par le palet sont :
• son poids P
vertical et vers le bas,
• la réaction normale de la glace R
verticale et vers le haut.
Troisième phase du mouvement
Le mouvement est rectiligne et décéléré (ralenti). La somme vectorielle des
forces est donc horizontale et de sens contraire au mouvement. Les forces subies
par le palet sont :
• son poids P
vertical et vers le bas,
• la réaction normale de la glace R
verticale et vers le haut,
• la force de frottements f
de la glace horizontale et opposée au mouvement.
1
/
3
100%