cours : statique - Bienvenue au département Génie Civil de l`IUT de

IUT Béthune – Génie Civil Année Spéciale– RDM S. KESTELOOT
Page n°1/15
COURS&:&STATIQUE&
I)#Généralités#:#
1.1) Introduction :
La statique et la Mécanique des Structures ont pour but d’expliquer les phénomènes
régissant le dimensionnement des constructions. Ces matières sont au dimensionnement ce
que les tables d’additions et de multiplications sont aux mathématiques : comment
comprendre une démonstration, un calcul … si on ne connaît pas l’addition ? ! ?
La statique et la Mécanique des Structures permettent d’appréhender la rupture ou la
déformation d’une construction appelée structure (bâtiment, pont…). La statique est la science
de base de la Mécanique des Structures. La Mécanique des Structures est elle-même la
science de base du calcul béton armé, charpente métallique, béton précontraint, bois …
Une structure reçoit des charges, elle est donc sollicitée. Sous ces charges, des
déformations et fissures se produisent au sein du matériau. Il est donc primordial d’étudier,
pour des raisons évidentes de sécurité, ces structures. L’étude de ces structures, appelées
solides, peut se décomposer en trois domaines :
- la statique : étude des solides indépendamment du mouvement ;
- la cinématique : étude du mouvement d’un solide indépendamment de ses causes ;
- la dynamique : étude des relations liant le mouvement du solide et sa cause.
Une structure subit des actions (exemple : l’effort d’une table sur le plancher). Cette action
agit de son point d’application à son (ou ses) point(s) de transfert à une autre structure
(généralement le sol). Tout au long de son parcours, l’action agit sur la structure, et peut
engendrer des désordres. L’étude du parcours de ces efforts s’appelle descente de charge. Elle
nécessite l’utilisation de lois physiques : la statique.
1.2) La Statique :
La statique étudie les conditions d’équilibre des forces appliquées aux solides
considérés indéformables. Une relation entre les forces extérieures appliquées à un système
matériel immobile est donné par le théorème de la Statique : le torseur de l’ensemble des
forces extérieures est constamment nul.
1. 3) Processus d’étude d’une structure :
! Structure dessinée par l’architecte ;
" Modélisation de cette structure (on supprime les éléments qui ne participent pas à la résistance de la
structure, exemple : revêtement de sol, faux plafonds, cloisons …) ;
# Evaluation des charges agissant sur la structure ;
$ Etude des sollicitations de chaque élément (cheminement des efforts dans la structure porteuse) ;
% Dimensionnement de la structure porteuse ;
II)#Actions#:#
Les actions que subissent les structures sont de deux natures. On distingue deux types
de vecteurs :

IUT Béthune – Génie Civil Année Spéciale– RDM S. KESTELOOT
Page n°2/15
- les forces ;
- les moments.
Ces actions sont caractérisées par :
- leur point d’application ou point de transfert : les actions agissent sur le solide en son
point d’application ;
- leur intensité ou norme;
- leur direction (axe support, droite d’action)
- leur sens.
Dans le monde du génie civil, on distingue des natures d’actions différentes :
- les charges permanentes (poids propre des ouvrages et de ses équipements…) ;
- les charges variables (dans le temps et/ou dans l’espace) :
& les charges d’exploitation (personnes et éléments pouvant bouger) ;
& les charges climatiques (action du vent, de la neige …) ;
& les charges accidentelles (camion venant percuter un bâtiment, séisme … action
qui a peu de chance de se réaliser mais qui doit quand même être étudiée).
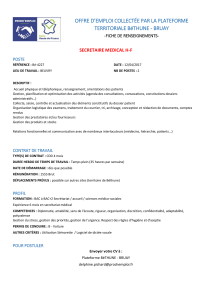
2.1) Les forces :
Si l’on considère une grue et son câble élastique. Le poids d’un élément préfabriqué
attaché sur ce câble entraîne, sous son poids propre (une force), un déplacement de translation
vertical, du haut vers le bas :
Une force traduit l’action qui est due à une cause (par exemple la force représentée ci-dessus
traduit l’action de l’élément préfabriqué sur la grue). Elle est provoquée par quelque chose.
!
Remarque : on dessine soit la force, soit la cause (soit l’élément préfabriqué, soit la flèche) mais JAMAIS les
2 en même temps.
2.1.1) Déplacement associé :
Une force (
F
) provoque une translation (
u
) de l’objet (déplacement ou déformation).
Dans la réalité, à chaque fois que l’on applique une force, il y a translation (même négligeable).
Le déplacement provoqué doit être négligeable pour que l’on puisse traiter le problème grâce
à la statique.
F
→
u
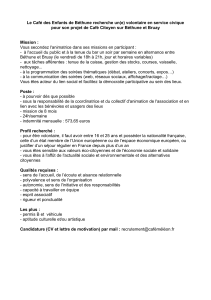
2.1.2) Représentation :
On représente la force par une flèche de longueur proportionnelle à son intensité.
Poids de
l’élément
Grue
A
F
Elément
préfabriqué
Grue
A

IUT Béthune – Génie Civil Année Spéciale– RDM S. KESTELOOT
Page n°3/15
REPRESENTATION DE LA
FORCE : Vecteur
FORCE : Flèche
Longueur de la flèche
Intensité de la force
Sens de la flèche
Sens de la force
Point origine de la flèche
point d’application de la force
!
Remarque : Le signe de la composante sera obtenu en orientant le support, c'est-à-dire en donnant un repère
conventionnel.
2.1.3) Deuxième loi de Newton :
L’unité de force est le newton [N]. Elle est dérivée des unités du SI selon la deuxième
loi de Newton :
Fma=×
ur r
avec F : force [N] / m : masse [kg] / a : accélération [m/s²] (ou [N/kg])
Sur terre, on applique plus particulièrement la loi :
Fmg=×
rr
(g : accélération de pesanteur : gravité).
!
Remarque : nous prendrons toujours g = 10m/s² (ce qui provoque une exagération de 2% … « précis, mais
pas ridicule ! »).
En vérité, un newton [N] est donc équivalent à un [kg.m/s²] en unité SI.
!
Exemple 1 : une personne de 80 kg exerce une force de 800 N sur le support où il marche (0,8 kN) ;
!
Exemple 2 : une machine de 10 tonnes exerce une force de 100 kN ;
!
Exemple 3 : une masse de 1 kg donne une force de 1 daN ;
!
Remarque : attention à la précision des calculs. Mettre « 8 » chiffres après la virgule ne sert à rien !
Toujours exprimer le résultat avec 3 chiffres significatifs.
2.1.4) Types de fores :
La force que nous venons de caractériser agit ponctuellement. C’est une force
concentrée (comme l’action d’une toupie sur son support). Il existe aussi des forces :
- linéiques (comme l’action d’un cylindre au sol) ;
- surfaciques (comme l’action d’une caisse sur son support, la pression de l’eau) ;
- volumiques (comme le poids propre agissant sur chaque élément de matière).
2.1.5) Composantes cartésienne d’une force :
Définir le signe de la composante d’une force n’est pas des plus aisée. C’est pourquoi
on décompose l’espace par l’intermédiaire de 3 axes :
Point d’application A
Sens
Direction :
droite d’action
F
A
Norme =
F
=F
échelle
repère

IUT Béthune – Génie Civil Année Spéciale– RDM S. KESTELOOT
Page n°4/15
)sin()cos(
θϕ
××=FFx
)sin(
ϕ
×=FFy
)cos()cos(
θϕ
××=FFz
222
zyx FFFF ++=
Les repères utilisés sont toujours des repères orthonormés (axes perpendiculaires) direct (sens des
axes selon la règle des 3 doigts de la main droite).
Qu’on soit en 2D ou en 3D, la relation vectorielle suivante doit se vérifier :
Σ Des forces = F (Soit en 3D :
xyz
FFFF++=
uur uur uur ur
)
2.2) Les moments :
2.2.1) Notion de Moments :
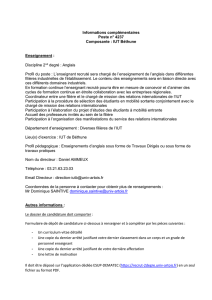
Lorsque l’on essaye d’ouvrir une porte, il ne nous vient pas à l’idée de pousser au niveau de la
charnière. Faites l’essai, vous verrez que pour l’ouvrir vous effectuerez des efforts bien plus
importants que si vous poussez sur la poignée (qui est éloignée de la charnière).
De même, si l’on tire dans l’axe de la porte, la rotation ne se produira pas :
Lorsque vous dévissez un boulon, avec une clef, c’est plus facile.
θ
Où l’opérateur doit-il positionner
sa main pour être le plus
efficace ? Dans quel sens doit se
faire l’action de l’opérateur sur
la clef ?

IUT Béthune – Génie Civil Année Spéciale– RDM S. KESTELOOT
Page n°5/15
2.2.2) Déplacement associé :
Cette fois ci, ce n’est plus une translation qui est provoquée par une force, mais une rotation
engendrée par un moment.
MA/z → ωA
2.2.3) Définition :
Un moment est un vecteur tournant.
2.2.4) Représentation et sens positif :
On représente le moment
par une force tournante (pour rappeler
qu’elle provoque une rotation) :
On définit un sens positif (« règle du tire bouchon » ou de la « main droite fermée ») :
Sens d’action du moment
positif
Sens positif et négatif dans un repère
( )
,0,xy
rur
2.2.5) Moment d’une force par rapport à un point :
Formule :
De manière générale, un moment est engendré par une force excentrée du point, centre
de rotation.
Soit une force F et un point A :
θ
zA
M/
A
x
y
O
A
MA/z
z
Moment en A par rapport à l’axe z
Rotation en A par rapport à l’axe z
Direction : droite d’action
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%