MZ20AR - Sorelest

Page 1
MZ20AR et MZ20B
Moteur pour vanne VZ29/39/49
Le servomoteur MZ20 est un moteur utilisé pour
l'assemblage des vannes série VZ29, VZ39,VZ49.
pour la regulation du debit d'eau chaude et froide,
des unités terminales a deux ou quatre tubes.
septembre
2007
Deux moteurs sont disponibles
MZ20AR alimentation 24Vac signal: 0-10V
MZ20B alimentation 24 Vac signal: 3 points
Moteurs type :
MZ20AR moteur modulant
MZ20B moteur 3 points
Alimentation 24Vac
Consommation 0,5VA
Fréquence 50/60Hz
Commande
MZ20AR 0-10 V
MZ20B 3 points
Temps de course 100 sec pour une course
de 5.5mm
Vitesse 15 sec/60Hz
Force 200N
Température
de fonctionnement +60°C
de stockage -25 à 65°C
Classe de protection III (IEC950)
Câble de branchement 3 fils
Degré de protection IP43
Produit en conformité avec la directives EMC 89/336
selon les normes
Emissions EN 50081-1
Immunité EN50082-1.
Caractéristiques techniques

Page 2
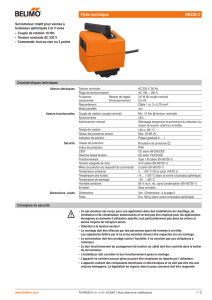
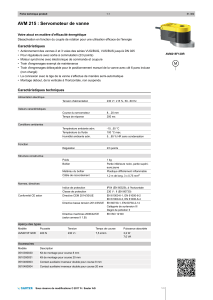
Dimensions
Fonctions
Le servomoteur MZ20B est du type électrique bi-
directionnel avec carte à microprocesseur pour
commande en signal proportionnel. La tige de
vanne est actionnée par la rotation d'une vis
reliée, par le biais d'un train d'engrenages, à un
moteur synchrone bi-directionnel.
Un joint magnétique à hystérèse réduit la force
appliquée à la tige vanne et évite l'emploi de
micro-interrupteurs de fin course et protège le
servomoteur contre les surcharges éventuelles.
Le servomoteur est équipé d’un dispositif CUT-
OFF; celui-ci coupe la commande du moteur
lorsque l’une des deux extrémités de la course
est atteinte et il garantit de cette façcon l’écono-
mie d’énergie la plus haute et la durée de l’appa-
reil la plus grande.
Le MZ20AR est aussi équipé d’un dispositif pour
l’auto-réglage de la position de fin de course, qui
s’actionne toutes les 10 heures de fonctionnement
et à chaque mise sous tension.( le moteur se
positionne quelques secondes en position 0 V de
commande ).
Caractéristiques de construction
Le servomoteur est constitué d’ une base et d’un couvercle en matériel synthétique qui contiennent un train
d'engrenages, le moteur, le joint magnétique et la vis pour la commande de vanne. Dans la partie inférieure
se trouve un système à collier M30x1,5 qui permet une adaptation aisée sur la vanne sans exiger d'outils
particuliers.
Une carte électronique est montée dans une embase en matière plastique dans la partie inférieure de la
base. Le servomoteur est complété d'un câble pour le branchement électrique à 3 fils
Le servomoteur n'exige aucun type d'entretien

Page 3
Le servomoteur peut être monté dans les positions horizontale ou verticale. Avant de monter le servomoteur
sur la vanne, enlever le bouchon de protection sur le corps de vanne et s'assurer que sur le servomoteur la
tige de poussée se trouve en regard de l'indicateur superieur (position de fourniture).
Dans le cas ou la position est différente, il faut savoir que, pour monter correctement le servomoteur sur la
vanne, on doit visser à fond le collier M30x1.5 sur le filetage qui se trouve sur le corps de vanne.
Exécuter les raccordements électriques conformément aux normes en vigueur.
A travers des ouvertures qui se trouvent en regard de la bague de fixation, on peut observer le sens du
mouvement de la tige de vanne.
Montage
Câblage
Moteur MZ20AR
Le servomoteur est fourni et réglé pour un signal de commande 0..10 V-, action directe.
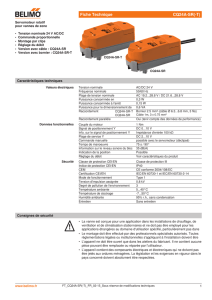
Pour changer cette position il faut:
•Enlever le bouchon en caoutchouc (voir l’illustration ci-dessous).
•Commuter sur ‘ON’ le DIP de 2 à 8 correspondant à la commande choisie.
•Action directe: DIP nr. 1 sur OFF --> Lorsque le signal augmente, la tige du servo-moteur descend
•Action inverse: DIP nr. 1 sur ON --> Lorsque le signal augmente, la tige du servomoteur monte
•Remettre le bouchon

Page 4
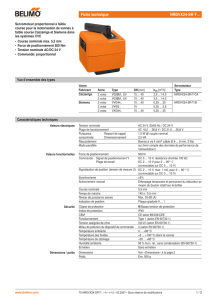
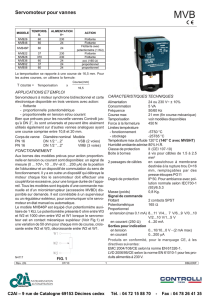
Câblage Moteur MZ20B
Câblage Moteur MZ20AR
Blanc=Commun
Vert=Signal de commande V
Marron=24 V~ 50/60 Hz
1
/
4
100%