PDF - 256 kb

Fiche Technique SHC24A-MF300
Servomoteur paramétrable linéaire
pour le réglage de registres dans
les installations de ventilation et de
climatisation du bâtiment
• Pour registres jusqu'a environ 3 m²
• Force 450 N
• Tension nominale AC/DC 24 V
• Commande (0)2...10 V DC,
paramétrable
• Signal de recopie DC 2…10 V,
paramétrable
• Course maximum 300 mm, ajustable
par paliers de 20 mm
• Temps de marche 75 s réglable
Caractéristiques techniques
Valeurs électriques Tension nominale AC/DC 24 V
Fréquence nominale 50/60 Hz
Plage de tension nominale AC 19.2...28.8 V / DC 21.6...28.8 V
Puissance consommée en fonctionnement 3,5 W
Puissance consommée à l'arrêt 1,3 W
Puissance pour le dimensionnement 6 VA
Raccordement d'alimentation/de commande Câble 1 m, 4 x 0.75 mm²
Raccordement parallèle Oui (tenir compte des données de performance)
Données fonctionnelles Force du moteur Min. 450 N
Force réglable réduction 25%, 50%, 75%
Signal de positionnement Y DC 0...10 V
Info. sur le signal de positionnement Y Impédance d'entrée 100 kΩ
Signal de positionnement Y réglable Tout-ou-rien
3 points (uniquement AC)
Proportionnelle (DC 0 ... 32V)
Plage de service Y DC 2...10 V
Plage de travail Y réglable Début DC 0.5...30 V
Fin DC 2.5...32 V
Signal de recopie U DC 2...10 V
Info. sur le signal de recopie U Max. 0,5 mA
Signal de recopie U réglable Début DC 0.5 ... 8 V
Fin DC 2.5 ... 10 V
Précision de la position ±5%
Sens de fonctionnement Sélectionnée par commutateur
Remarque sens de fonctionnement Y = 0 V: with switch 0 (rétracté) / 1 (étendu)
Sens de fonctionnement réglable Sens de rotation electriquement réversible
Commande manuelle Débrayage de l'engrenage par bouton-poussoir,
peut être verrouillé
Longueur de course Max. 300 mm, ajustable par paliers de 20 mm
Limitation de la course Peux être limité des deux côtés par des butées
mécaniques réglables
Temps de course 75 s / 100 mm
Temps de marche réglable 65...260 s / 100 mm
Adaptation de la course manuel
Adaptation de la course réglable Sans action
Adaptation lors de la mise sous tension
Adaptation après débrayage du servomoteur
Commande forcée MAX (position maximale) = 100%
MIN (position minimale) = 0%
ZS (position intermédiaire, uniquement AC) = 50%
Commande forcée réglable MAX = (MIN + 32%)...100%
MIN = 0%...(MAX – 32%)
ZS = MIN...MAX
Information sur le niveau sonore 52 dB(A)
Sécurité Classe de protection CEI/EN Classe de protection III
Classe de protection UL UL Class 2 Supply
Indice de protection CEI/EN IP54
Indice de protection NEMA/UL NEMA 2, UL Enclosure Type 2
CEM CE conforme 2004/108/EC
www.belimo.fr FT_SHC24A-MF300_FR_02-16_Sous réserve de modifications techniques 1

Sécurité Certification CEI/EN IEC/EN 60730-1 et IEC/EN 60730-2-14
Certification UL cULus selon UL 60730-1A et UL 60730-2-14 et
CAN/CSA E60730-1.02
Mode de fonctionnement Type 1
Tension assignée de choc / commande 0.8 kV
Degré de pollution de l'environnement 3
Température ambiante -30...50°C
Température de stockage -40...80°C
Humidité ambiante 95% r.h., sans condensation
Entretien Sans entretien
Poids Poids 1,5 kg
Consignes de sécurité
!
• Le servomoteur de clapet ne doit pas être utilisé pour les applications n'appartenant pas au
domaine spécifié, notamment pas les avions ni dans tout autre moyen de transport aérien.
• Application extérieure: uniquement possible dans le cas où il n'y à pas d'eau (de mer),
de neige, de glace, de lumière du soleil directe ou de gaz agressifs, directement sur le
servomoteur tout en s'assurant que les conditions ambiantes restent à tout moment dans les
seuils conformément aux données de la fiche technique.
• Le montage doit être effectué par des personnes ayant été formées à cet effet. Toutes
réglementations officielles ou réglementations émanant d’une autorité reconnue doivent être
observées durant l’installation.
• L'appareil ne doit être ouvert que dans les usines du fabricant. Il ne contient aucune pièce
pouvant être remplacée ou réparée par l'utilisateur.
• Le câble électrique ne doit pas être démonté.
• Le support rotatif et adaptations disponibles en accessoires, doivent être toujours utilisés si une
force latérale est présente. De plus, le servomoteur doit être parfaitement fixé sur l'application.
Il reste toutefois ajustable en utilisant le support rotatif (voir "instructions de montage")
• Si le servomoteur est exposé à une atmosphère particulièrement agressive, les précautions
nécessaires devront être prise coté système. Un dépôt excessif de poussière, suie, etc. peut
gêner le mouvement d'extension et de rétractation de la tige.
• Si le servomoteur n'est pas installé horizontalement, le bouton de débrayage ne doit être utilisé
que si il n'y a aucune pression sur la tige du servomoteur.
• Pour déterminer la force requise, tenir compte des indications du fabricant de registre (section,
type, lieu de montage des clapets), et aux conditions aérauliques.
La force peut être amoindrie par l'utilisation du support de rotation et/ou de pièces de montage et
d'adaptation supplémentaires.
• L’équipement contient des composants électriques et électroniques qui ne doivent pas
être jetés aux ordures ménagères. Les réglementations et exigences locales doivent être
observées.
Caractéristiques du produit
Fonctionnement Le servomoteur est actionné par un signal de commande DC 0...10 V et se positionne
proportionnellement à la valeur de ce signal. La tension de mesure U (signal de
recopie) peut être utilisée pour afficher la position électrique 0...100 % ou comme
signal de commande pour d'autres servomoteurs.
Servomoteurs paramétrables Les paramètres usine répondent à la plupart des applications courantes. Certains
d'entre eux peuvent être modifiés à l'aide du logiciel PC-Tool MFT-P ou de l'outil de
paramétrages ZTH EU.
Montage simple Le servomoteur peut être directement installé avec les vis fournies. La partie supérieur
de la tige est directement raccordable sur l'élément à actionner ou en utilisant les
pièces d'adaptations Z-KS1 incluses.
Commande manuelle Actionnement manuel possible avec bouton-poussoir (débrayage temporaire /
permanent)
Course réglable Si une limitation de course doit être réglée, le premier palier doit être réglé à 20 mm
sur la tige, puis la course est réglable par palier de 20 mm en utilisant l'accessoire
mécanique de fin de course Z-AS1.
SHC24A-MF300 Servomoteur linéaire, proportionnel, AC/DC 24 V, 450 N,
Temps de course de 75 s
Caractéristiques techniques
www.belimo.fr
FT_SHC24A-MF300_FR_02-16_Sous réserve de modifications techniques
2

Sécurité de fonctionnement élevée Le servomoteur est protégé contre les surcharges, ne requiert pas de contact de fin de
course et s'arrête automatiquement en butée.
Position de départ Lorsque le servomoteur est mis sous tension pour la première fois, i.e. pour son
paramétrage, il réalise une adaptation (synchronisation). La synchronisation est à la
position de départ (0%). Le servomoteur se déplace alors dans la position définie par
le signal de positionnement.
Y = 0 V
Y = 10 V
0
1
Adaptation et synchronisation Il est possible de lancer une adaptation à tout moment en appuyant sur le bouton
d'adaptation ou via le PC-Tool. Les butées de fin de course sont ainsi detectées
lors de l'adaptation (plage de fonctionnement complète) Adaptation automatique
après avoir appuyé sur le bouton de débrayage. La synchronisation est à la position
de départ (0%). Le servomoteur se déplace alors dans la position définie par le
signal de positionnement. Une liste de paramètres sont réglable via le PC-Tool (voir
documentation MFT-P)
Accessoires
Description Type
Accessoires électriques Indicateur de position digitale 0...99% pour montage en façade
d'armoire électrique 72 x 72 mm
ZAD24
Correcteur de caractéristiques pour montage mural Limitation de l'angle
de rotation min/max
SBG24
Positionneur pour montage mural 0...100% SGA24
Positionneur montage Rail-DIN, plage 0...100% SGE24
Positionneur pour montage en façade d'armoire électrique 0...100% SGF24
Positionneur pour montage mural 0...100% CRP24-B1
Câble de raccordement 5 m, A+B: RJ12 6/6, pour ZTH EU / ZIP-USB-MP ZK1-GEN
Câble de raccordement 5 m, A: RJ11 6/4, B: extrémités dénudées pour
ZTH EU / ZIP-USB-MP
ZK2-GEN
Convertisseur de signal tension/courant, alimentation AC/DC 24V Z-UIC
Description Type
Accessoires mécaniques Support rotatif pour compenser les forces transversales Z-DS1
Pièce de raccordement M8 pour SH, acier galvanisé Z-KS1
Kit d'arrêt pour SH Z-AS1
Description Type
Outils de paramétrage Boitier de paramétrages/diagnostics, pour servomoteurs MF/MP/
Modbus/LonWorks et VAV controller
ZTH EU
PC-Tool de Belimo, logiciel de paramétrage pour réglages et diagnostics MFT-P
Adaptateur pour boitier ZTH MFT-C
SHC24A-MF300 Servomoteur linéaire, proportionnel, AC/DC 24 V, 450 N,
Temps de course de 75 s
Caractéristiques du produit
www.belimo.fr FT_SHC24A-MF300_FR_02-16_Sous réserve de modifications techniques 3

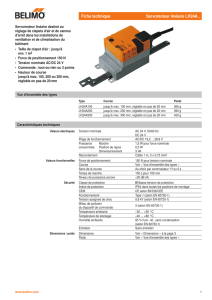
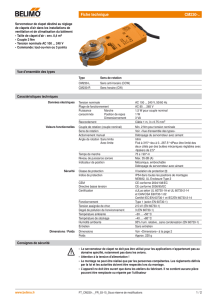
Schémas de raccordement
24 V AC/DC, proportionnel
Y
U
1 32 5
–
+
T
~
DC (0)2…10 V
DC 2…10 V
Couleurs des câbles :
1 = noir
2 = rouge
3 = blanc
5 = orange
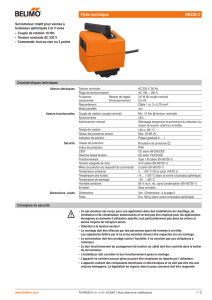
Fonctions
Câblage avec valeurs basiques (fonctionnement classique)
Commande forcée AC 24 V avec contacts de relais Commande forcée AC 24 V avec switch multi-positions
abc
0%
ZS 50%
100%
Y
ab
c
~T
Y (DC 0...10 V)
e.g. 1N 4007
1235
YU
~T
e.g. 1N 4007
1235
YU
0%
ZS 50%
100%
Y
(DC 0...10 V)
Commande à distance 0 ... 100
% avec positionneur SG..
Limitation minimale avec positionneur SG..
1235
YU
–
+
T
~
SGA24
SGF24
SGE24
YZ
1234
–
+
T
~
1235
YU
SGA24
SGF24
SGE24
YZ
1234
Y (DC 0...10 V)
100
0
Y [V]
10
min
0 [%
]
–
+
T
~
–
+
T
~
Commande de suivi (selon la position) Indication de la position
1 32 5
–
+
T
~
1 32 5
Y
U
DC (0)2…10
V
DC 2…10 V
YU YU
1)
~T
1 2 3 5
YU
ZAD24
12 3 4
+
–
(1) Adaptation sens de rotation
SHC24A-MF300 Servomoteur linéaire, proportionnel, AC/DC 24 V, 450 N,
Temps de course de 75 s
Installation électrique
www.belimo.fr
FT_SHC24A-MF300_FR_02-16_Sous réserve de modifications techniques
4
!
Notes • Raccordement sécurisé par transformateur d'isolement.
• Raccordement parallèle d'autres servomoteurs possible. Tenir compte des
données de performance.

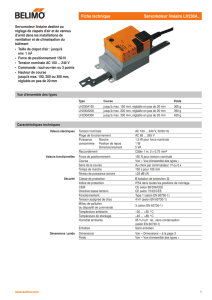
Commande 4...20 mA via résistance externe Valeurs fonctionnelles
U
1 32 5
4…20 mA
DC 2…10 V
500 Ω
(
+
)
(–)
U
Y
–
+
T
~
Attention:
La plage de travail doit être réglée
sur DC 2...10 VLa résistance de
500 Ω convertit le signal d'intensité
4 à 20 mA en un signal de tension 2
à 10 V DC
1 32 5
–
+
T
~
U
Y
Procédure
1. Appliquez une tension AC 24 V
sur 1 et 2
2. Déconnectez le fil 3 :
- avec le bouton de selection sur 0 :
la tige du servomoteur rentre
- avec le bouton de selection sur 1 :
la tige du servomoteur sort
3. court circuitez les fils 2 et 3 :
- Le servomoteur va dans la
direction opposée
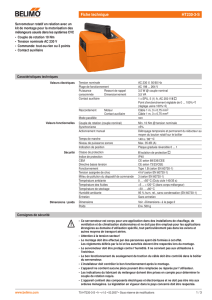
Fonctions possibles des servomoteurs avec paramètres spécifiques (nécessite un paramétrage via PC-Tool)
Commande forcée et limitation avec contacts AC 24 V Commande forcée et limitation avec switch multi-positions AC 24 V
ab
e
cd
~T
Y (DC 0...10 V)
e.g. 1N 4007
1235
YU
abc
Close 1)
MIN
ZS
MAX
d e
Open
Y
~T
e.g. 1N 4007
1235
YU
Close
1)
MIN
ZS
MAX
Open
Y
(DC 0...10 V)
1) Attention: Cette fonction n'est
possible qu'avec une entrée de
commande fixée au minimum à 0.5
V
Commande tout-ou-rien Commande 3 points
U
1235
YU
–
+
T
~
ab
~T
U
e.g. 1N 4007
1235
YU
ab
0
1
0
1
SHC24A-MF300 Servomoteur linéaire, proportionnel, AC/DC 24 V, 450 N,
Temps de course de 75 s
Fonctions
www.belimo.fr FT_SHC24A-MF300_FR_02-16_Sous réserve de modifications techniques 5
 6
7
6
7
1
/
7
100%