Actionneur électrique

Montage possible de détecteurs
Note) LEY63 compatible uniquement
avec le modèle de moteur en ligne
.
∗ Taille: 25, 32
Type guidage integré
Série
LEYG
®
RoHS
Nouveau
Nouveau
Spécifications d’étanchéité à la poussière/Projection d'eau (IP65): -X5
Type avec entrée de données de positionnement
Série LECP6/LECA6
Contrôleur sans programmation
Série LECP1
Type à entrées impulsionnelles
Série LECPA
Pour codeur absolu
Type à entrées impulsionnelles
Série LECSB
Type CC-Link
Série LECSC
Type SSCNET III
Série LECSS
Pour codeur incrémental
Type à entrées impulsionnelles/
Type de positionnement
Série LECSA
Moteur pas-à-pas
(Servo/24 Vcc)
Servomoteur CA
Servomoteur (24 Vcc)
e
n
t
t
t
t
t
t
t
n
es
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
s
n
nelles
/
nt
∗ Non compatible avec UL.
Contrôleur Contrôleur
∗ Non compatible avec UL.
64 points de positionnement
14 points de positionnement
e
s
Taille: 16, 25, 32, 40
Taille: 16, 25, 32, 40
Taille: 25, 32, 63 Note)
Taille: 25, 32
Spécifications d’étanchéité à la poussière/Projection d'eau (IP65): -X5
Type tige Série LEY
Puissances moteur
élevées (100/200/400 W)
Capacité de transfert de vitesse élevée
améliorée
Compatible avec une accélération élevée
(5 000 mm/s2)
Type à entrées impulsionnelles/
CC-Link/SSCNET III
Avec codeur absolu interne
(caractéristiques LECSB/C/S)
Type
Type tige
Type tige/
Type moteur en ligne
Servomoteur CA
Grande course :
max. 500 mm (LEY32, 40)
Charge latérale finale : 5 fois plus∗
Compatible avec des guides lisses et des guides
à billes.
Compatible avec la charge du moment et une
butée (guides lisses).
Possibilité de choisir entre contrôle de positionnement
ou de poussée.
Possibilité de maintenir l'actionneur lors de la poussée
de tige sur une pièce, etc.
Type tige Type tige/
Type moteur en ligne
Type guidage integré
Type guidage integré
Type guidage integré/
Type moteur en ligne
Type guidage integré/
Type moteur en ligne
Type tige
Type tige Série LEY
Type guidage integré Série LEYG
Type guidage integré
Possibilités de montage
Fixation intégrée : 3 sens, montage de la fixation : 3 types
Possibilité de choisir entre contrôle de positionnement ou
de poussée.
Possibilité de maintenir l'effort sur l'actionneur pour brider une pièce, etc.
Type
∗ En comparaison au type tige, taille 25 et course 100
Moteur pas-à-pas (Servo/24 Vcc)
T
Servomoteur (24 Vcc)
Actionneur électrique
CAT.EUS100-83D-FR
Série LEY

A7.5∗
A7.5∗
16
25
32, 40
35.5
46.5
61
67.5
92
118
[mm]
Pages 19, 20
Plage d'utilisation
OFF
ON
Rouge
Vert
Rouge
Plage d'utilisation optimale
Racleur
Série LEY
Contrôle possible de la poussée et du positionnement intermédiaire
Fonctionnement haute précision avec les vis à billes
(Répétitivité de positionnement : ±0.02 mm)
Prévient l'intrusion de corps étrangers.
Tenon
de tige
Accouplement
flottant
Chape
de tige
Pour un mouvement manuel de la tige
Réglage possible lorsque l'alimentation
est coupée
s Câble standard
s Câble robotique (câble flexible)
Vis de réglage pour commande manuelle
2 types de câble de moteur proposés
Type tige Série LEY /Taille : 16, 25, 32, 40
s
Moteur pas-à-pas (servo/24 Vcc)
Idéal pour transférer des charges lourdes à une
vitesse faible et pour des opérations de poussée
s
Servomoteur (24 Vcc)
Stable et silencieux à vitesse élevée
Empêche les pièces de chuter
(maintien) lors d'une coupure de
courant
Type parallèle
avec moteur côté droit
Type parallèle avec
moteur côté gauche
Type moteur
en ligne
Le type avec montage par le haut est le produit standard.
Possibilité de choisir la position de montage du moteur
Racleur
Fixations de fin de tige
Dimension de la hauteur réduite jusqu'à 49%
Type moteur en ligne
∗ Lorsque “Option de
moteur/Avec couvercle
moteur” est sélectionné.
Pour LEY16D Pour LEY16
Dimension A
Taille Moteur en ligne
Moteur parallèle
Détecteur statique double visualisation
Le réglage adéquat de la position de montage
peut être réalisé sans erreurs.
Contrôle la limite et le signal intermédiaire
Compatible avec le D-M9 et le D-M9W (double visualisation)
Rainure du détecteur
∗
Les détecteurs doivent être commandés séparément. Reportez-vous aux pages 21 et 22 pour plus de détails.
Couvercle de moteur disponible
(en option)
Frein activé par manque de courant
(en option)
Vitesse
Charge de travail
Moteur pas-à-pas
Servomoteur
2 types de moteurs au choix
Type
Moteur pas-à-pas (Servo/24 Vcc) Servomoteur (24 Vcc)
Détecteur
Une lumière
verte
s'allume pour la plage
d'utilisation optimale.
Type du moteur
par le haut / en parallèle
Caractéristiques 1

Série LEY /Taille: 25, 32, 63
Puissances du moteur élevées (100/200/400 W)
Capacité de transfert de vitesse élevée améliorée
Compatible avec une accélération élevée (5000 mm/s2)
Types à entrées impulsionnelles/entrée directe CC-Link/
SSCNET III
Avec codeur absolu interne
∗
Codeur incrémentiel également disponible.
Type
Actionneur électriques
Type tige
Type tige
Type tige/
Type moteur en ligne
Type tige/
Type moteur en ligne
Vitesse
Charge de travail
Moteur pas-à-pas
Servomoteur CA
Servomoteur
Servomoteur CA
Nouveaux alésages de gros diamètres 63!
Charge
Moteur à sortie élevée : 400 w
Vitesse max. : 1000 mm/s
∗ Course de 500
Force de préhension max. :
1910 (N)
Étanche à la poussière et
aux projections d'eau
(IP65)
Horizontal
Vertical
80 kg
72 kg
Caractéristiques 2

25
±0.05°
±0.06°
32 40
Intégration compacte de l'unité de guidage
Permet une résistance aux charges
latérales et une précision antirotation.
é
Série LEYG /Taille : 16, 25, 32, 40
Type
Moteur pas-à-pas
(servo/24 Vcc)
Servomoteur (24 Vcc)
p
p
p
p
Série LEYG /Taille : 25, 32
Type
T
Série LEY
Lors de la sortie de tige du vérin (valeur initiale), la
précision d'antirotation, sans charges ni flèche des
colonnes, doit être une valeur inférieure ou égale à la
valeur du tableau considéré comme référence.
Alésage [mm]
Guides lisses
Guides à billes
Rigidité améliorée
Charge latérale finale
:
5 fois plus∗
∗ En comparaison au type tige,
taille 25 et course 100
Utilisation de deux tiges de guide pour
une précision d'antirotation améliorée
Type guidage integré
Type guidage integré
s Guides lisses
Convient à des applications de charge latérale
comme une butée en cas de chocs.
s Guides à billes
Un fonctionnement sans à-coups convient
à la poussée et au levage
Compatible avec des guides lisses et des guides à billes.
Type moteur parallèle
Type guidade integré
Type guidade integré/
Type moteur en ligne
Type moteur en ligne
16
±0.06°
±0.07°
Servomoteur CA
Pour l'utilisation de détecteurs
avec les modèles à tige de
guidage de la série LEYG,
reportez-vous à la page 118.
Montage direct
Fond arrière Extrémité de tige
Base du corps
Montage par fixation
Bride arrière Chape arrière
∗ Base de corps taraudée : Lorsque "U" est sélectionné.
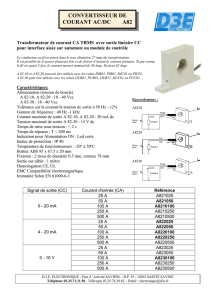
Exemples d'applications
Levage Distribution
Rotation
Opération de poussée
Fixation sous pression
Butée
Équerre Bride avant
Possibilités de montage
Caractéristiques 3

Classe de protection : IP65
Course max. : 500 mm∗
∗ Taille 32
Réservoir de lubrifiant
Retient le film d'huile de graisse.
Racleur
Matière : Nylon
Empêche la poussière et les
projections d'eau de pénétrer entre le
câble et le couvercle du moteur.
Type de montage
par le haut du moteur
Type moteur en ligne
Type de montage
par le haut du moteur
Type moteur en ligne
LEY-X5 (voir la page 23.)
LEY-X5 (voir la page 103.)
Actionneur électriques
Servomoteur CA (100/200 W)
Type
Type
Type
Moteur pas à pas
(Servo/24 Vcc)
T
Servomoteur (24 Vcc)
Eêhl iè tl
Raccord d’étanchéité
Protège le moteur.
Ptè l t
Couvercle en aluminium
Réduit la fluctuation de la
pression interne pour
empêcher la poussière et les
projections d'eau de pénétrer.
Réd it lfl t ti dl
Trou d'aération
Rainure pour le détecteur statique
Spécifications d’étanchéité à la poussière/projection d'eau (IP65)
25, 32
Taille
Type moteur en ligne
LEY63D-P
(voir la page 98./Option)
Servomoteur CA (400 W) Type
63
Taille
Modèle résistant à l’eau
(agent de refroidissement)
Pour le contrôle de fin de course
et l'arrêt intermédiaire.
∗
Commander séparément le détecteur statique
résistant à l'eau avec indication 2 couleurs.
(voir la page 28)
Caractéristiques 4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
1
/
160
100%