Conception d`un régulateur à faible chute de tension 4V, 5mA à

SETIT 2005
3rd International Conference: Sciences of Electronic,
Technologies of Information and Telecommunications
March 27-31, 2005 – TUNISIA
Conception d’un régulateur à faible chute de tension
4V, 5mA à ballast NMOSFET, optimisé pour les
systèmes de télémesures intracorporelles alimentées par
induction magnétique
Francis Rodes*, Olivier Chevalerias*, Eliane Garnier*, Khaled Salmi*, Philippe
Lourenco de Oliveira*, Philippe Marchegay*,Franz Burny **
* ENSEIRB / IXL, Biotelemetry Lab.351 cours de la libération 33405 Talence, France
rodes@enseirb.fr
garnier@enseirb.fr
** Service Orthopédie-Traumatologie, Hôpital Erasme. ULB. B-1070 Belgique.
Résumé: Cet article décrit la conception d’un régulateur linéaire à ballast N-MOSFET présentant à la fois une faible chute de
tension et une grande stabilité. La topologie adoptée est optimisée pour le conditionnement de la tension du secondaire d’une
alimentation par induction magnétique.
Mots clés: Inductive power supply, Low Drop Out (LDO), Voltage regulator,
1 Introduction
Pour télé surveiller les contraintes mécaniques subies
par un implant orthopédique métallique, une méthode
consiste à placer à l’intérieur d’une cavité hermétique
de l’implant, un système de télémesure de contraintes
intracorporelles complet.
Afin d’obtenir, une autonomie illimitée, la
transmission d’énergie et d’informations s’effectue
sans fil par induction magnétique sur une fréquence
porteuse de 125kHz.
Le conditionnement de l’énergie transmise à
l’intérieur de l’implant nécessite alors de recourir à un
régulateur de tension capable de satisfaire les
contraintes suivantes :
- Produire un courant de l’ordre de 5mA sous
une tension de 4V.
- Maintenir la régulation avec une chute de
tension la plus faible possible, de façon à
atteindre une portée de transmission la plus
élevée possible.
- Etre suffisamment rapide pour atténuer les
ondulations de la tension d’entrée à 125 kHz.
- Consommer un minimum d’énergie.
- Pouvoir fournir des surintensités de 12mA.
- Etre stable quelle que soit la charge en sortie.
- Ne pas nécessiter de composants passifs non
intégrables sur ASIC.
En première analyse, le régulateur linéaire
classique avec ballast de type transistor NPN ou
NMOSFET, ne convient pas en raison de la chute de
tension élevée entre l’entrée et la sortie du régulateur.
Celle-ci atteint en effet 1V pour un transistor NPN et
2V pour un MOSFET de type N.
Pour remédier à ce défaut la solution classiquement
envisagée est un régulateur linéaire à faible chute de
tension ou ¨Low Drop Out¨ (LDO) avec un transistor
ballast type transistor PNP ou MOSFET P.
Mais, de même, cette solution souffre de plusieurs
inconvénients qui la condamnent pour l’application
visée. En effet, d’après (Simpson, 1996), (Rincon-
Mora, 1998):
- L’utilisation d’un transistor bipolaire de type
PNP ou MOSFET de type P risque de rendre
le système instable en introduisant un pôle
supplémentaire aux basses fréquences.
- La stabilisation de régulateur nécessite de
connecter sur sa sortie un condensateur de
forte valeur associé à une résistance série.
- Le couple condensateur / résistance série,
n’assure la stabilité que pour un courant de
charge bien déterminé. Si la charge est
variable, la stabilité risque de ne plus être
assurée.
Pour résoudre le problème posé, nous avons été
amenés à concevoir une topologie plus originale
rassemblant les avantages des deux solutions
précitées :
- La stabilité du régulateur linéaire classique
avec ballast de type transistor NPN ou
NMOSFET.
- Un faible chute de tension entrée / sortie.
La solution adoptée consiste à surélever la tension de

SETIT2005
commande du NMOSFET de sorte que celle-ci
n’intervienne plus dans la chute de tension entrée /
sortie. Le schéma simplifié de ce régulateur est
représenté à la figure 1, son principe est décrit ci-
dessous dans le paragraphe 2.
2 Régulateur type “low drop out” avec
ballast NMOSFET
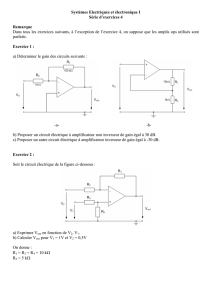
Le schéma de principe de cette nouvelle topologie
est représenté sur la figure 1. Pour obtenir une
faible chute de tension avec un ballast NMOSFET,
l’idée consiste à surélever la tension d’alimentation
de l’amplificateur d’erreur (A), par rapport à la
tension d’entrée (Vin). La valeur de la surtension à
produire devant être supérieure au V
GS nécessaire
pour assurer la mise en conduction du NMOSFET.
Figure1. Schéma de principe du régulateur à faible chute de
tension avec ballast NMOSFET
Pour générer cette surtension deux techniques
peuvent être employées selon la nature de la
tension d’entrée :
- Si la tension d’entrée est continue (pile,
accumulateur), la seule solution possible
consiste à recourir à une convertisseur à
découpage (à capacités commutées par
exemple).
- Si la tension d’entrée est alternative, la
solution est bien plus simple, puisqu’il
suffit de réaliser un doubleur de tension à
diode et condensateurs (ou générateur de
tensions symétriques), et le placer en
amont du régulateur (voir figure 1).
Une transmission d’énergie par induction
magnétique produisant naturellement une tension
alternative aux bornes de la bobine secondaire (LS),
c’est évidemment la deuxième technique que nous
avons adoptée. C’est ainsi que nous avons abouti au
schéma de principe complet représenté sur la figure
1. Du fait de la présence d’une surtension, et des
contraintes spécifique à l’application, la conception
des éléments qui composent le schéma de la figure 1
présente quelques particularités qui sont décrites
dans les paragraphes qui suivent.
3 L’amplificateur d’erreur et le circuit de
démarrage
La résistance de sortie R
s d’un régulateur
conditionne sa régulation en charge. En effet, plus
cette résistance est faible, plus performant est le
régulateur. L’expression simplifiée de la résistance
de sortie d’un régulateur tel que celui représenté
figure 1 est d’après (Grebene, 1987) donnée par la
relation (1).
( )
+
+
+=
21
2
m
21s
RR R
A1.g
1
//RRZ (1)
gm représente la transconductance du transistor
ballast.
Cette relation montre que pour obtenir une faible
valeur de résistance de sortie, il faut concevoir un
amplificateur d’erreur avec un gain le plus élevé
possible.
En outre, une bonne régulation aussi bien en amont
qu’en aval n’est possible que si la fréquence de
coupure de l’amplificateur d’erreur est supérieure à
la fréquence de la transmission par induction
magnétique (125kHz).
Par ailleurs, l’alimentation de l’amplificateur se fait
sous 12V grâce au doubleur de tension placé en
amont. Or, dans la technologie BiCMOS 0.8µm
d’AMS (AMS, 1995), la tension de claquage de
l’oxyde est de l’ordre de 13V. La marge de sécurité
semble donc très faible, et une étude plus
approfondie de la tenue en tension du circuit
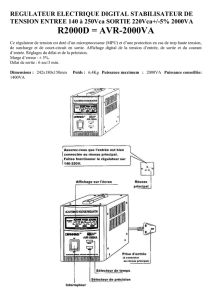
s’avère nécessaire. La figure 2 nous montre que
seuls les puits N et le substrat ont à supporter la
tension maximale du circuit. En effet, le substrat
dopé P se situe au potentiel le plus bas du circuit,
c’est-à-dire la masse pour cette application. Les
puits N, eux, se situent au potentiel le plus élevé
(12V).
Figure 2. Vue en coupe d’un PMOS en technologie AMS
BiCMOS
La tension maximale pouvant être appliquée entre
la couche N+ Well et le substrat P est de 55V (AMS,
1995), celle entre la couche enterrée N+ et le substrat
P est de 33V : il n’y a donc aucune contre-indication
à utiliser une tension de 12V.
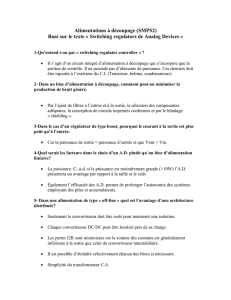
La source de courant associée à l’amplificateur est
représentée sur la figure 3. La source de courant elle-
même est composée des transistors Q1 à Q4 et de la
résistance R
1. Dans cette structure, la résistance R
2
sert à la polarisation de la source de courant. Sur la
figure 4, cette source de courant est symbolisée par le
générateur de courant I.

SETIT2005
Q2 (1)
R2
Vdd
R1
Q4 (1)
Q1 (N)Q3 (1)
Iref
Figure 3. Schéma de la source de courant
En première approximation l’expression de I est de
la forme:
1
tR)Nln(U
I⋅
=où :q
kT
Ut= (2)
Il n’est pas nécessaire que le courant de référence
soit élevé. En effet, nous utilisons le rapport des
dimensions sur les PMOS M
12 et M
13 (figure 4)
montés en miroirs de courant pour obtenir le
courant désiré dans les différentes branches. Pour
rester dans des dimensions relativement faibles,
nous avons fixé le courant de référence à 4µA. N est
donné par le rapport S
Q1/SQ3 (Figure 3). Pour
minimiser la surface occupée par R1, N est fixé à 2.
V0
I
M3 M4 M7
M8
T5 T6
R5 R6
R1
R2
I1
I
M9 M10
M12
M13 M14
M11
T7 T8
R7 R8
Vout
Amplificateur d'erreur
Circuit de démarrage
Vbg
Vin
2Vin
R10
R9 Ta
Figure 4. Schéma complet de l’amplificateur d’erreur
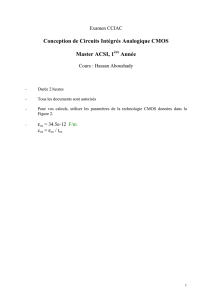
L’amplificateur d’erreur de la figure 4 est constitué
de deux étages de gain. La paire différentielle en
entrée du premier étage (M9, M10) est de type
PMOSFET afin d’obtenir une grande résistance
d’entrée. Pour réduire le bruit, on utilise deux
transistors en parallèle avec un rapport W/L
important. Ceci permet d’obtenir un gain élevé ainsi
qu’une fréquence de coupure de l’ordre de 500kHz.
Avec cet étage d’entrée, le gain obtenu en
simulation est de 48dB avec un courant
d’alimentation ne dépassant pas 40µA. La fréquence
de coupure est proche de 500 kHz avec des temps
de montée et de descente de l’ordre de la µseconde.
Le second étage constitué d’une simple source
commune (M11) a un gain de 23dB pour une
consommation de 31 µA. L’excursion en sortie est
limitée d’une part au niveau bas par le V
ds du
NMOS (M11), et d’autre part au niveau haut par le
Vds du PMOS (M14) monté en source de courant.
(Ce dernier limitant le niveau haut à : 2Vin-Vds. Les
différents temps de montée, de descente et de
propagation de l’amplificateur sont inférieurs à 500
ns.
La tension de référence de type bandgap étant
alimentée par la sortie du régulateur, elle ne
fonctionne pas correctement tant que cette tension
de sortie n’atteint pas 4V. Par conséquent, un
circuit de démarrage représenté à la figure 4 a été
ajouté pour produire une tension de référence
même si le bandgap n’est pas à son point de
fonctionnement optimal. En effet, tant que le
bandgap est inférieur à sa valeur nominale, c’est un
circuit diviseur de tension (R9,R10) qui fait office de
référence de tension. Dès que la tension de sortie
atteint une valeur permettant un fonctionnement
correct du bandgap, ce dernier prend la relève et le
fonctionnement normal est rétabli. Avec un
amplificateur d’erreur équipé de ce circuit de
démarrage, un PSRR de 56dB minimum a pu être
maintenu dans le pire des cas.
4 La référence bandgap
Une solution permettant d’obtenir une tension
constante stable en température consiste à faire la
somme de deux tensions à dérives opposées. Ce
principe est à la base de différents circuits, et
notamment les références de Widlar et de Brokaw
(Gray & al, 1982).
Pour notre application, nous avons choisi le
bandgap de Brokaw dont le schéma de principe est
représenté sur la figure 5.
Q1 (1)
Q5
Q2 (N)
R2
R1
Vcc
R3
Q3 (1) Q4 (1)
R4
Vout=Vbg
Vbe1 Vbe2
C1
Figure 5. Référence Brokaw
Le principe de fonctionnement de cette référence de
tension est le suivant :
Supposons que la tension sur la base de Q1
diminue. Dans ces conditions, la différence des
courants dans la paire (Q1, Q2) est ajoutée au
courant de base de Q5 par l'intermédiaire du miroir
(Q3, Q4). Il en résulte une augmentation du courant
de collecteur du transistor Q5 et par conséquent de

SETIT2005
la différence de potentiel aux bornes de la résistance
R4. La tension sur la base de Q1 est ainsi ramenée à
sa valeur initiale. Par conséquent, le circuit
constitue une boucle de rétroaction. La capacité C
1
est ajoutée de façon à stabiliser le système en lui
assurant une marge de phase suffisante.
En négligeant les courants de base, l’équation à
l'équilibre ( III C2C1 == ) s'écrit :
I RVVV 2BE2BE1BE =−=∆
I est le courant de polarisation du miroir (Q3, Q4)
donné par (2), soit :
.ln(N)U = .IRt2
L'expression de Vout fait intervenir BE
V et t
U et
s’écrit
ln(N)
R
R
U2VIR2VV 2
1
tbe1beout ⋅⋅+=⋅⋅+= (3)
En se référant à (Gray & al, 1982) pour le
développement de (3), nous déduisons que la
valeur optimale de Vout pour une température T0
fixée s’écrit :
( ) ( )
0
TTT0g
0
TTbg
out U.EVV =
=α+== (4)
Eg0 est la tension de la bande interdite du silicium et
α un paramètre technologique (α ≈ 2,2).
De cette façon, on peut minimiser les variations de
la tension Vout sur une plage de température en
cherchant à placer l'optimum au milieu de cette
gamme. Dans notre cas, la température normale du
corps étant de 37°C, on obtient 1,12V pour Vout.
Dans la version améliorée de la figure 6, un second
circuit de démarrage est prévu.
Dès que la tension aux bornes de R1 est suffisante,
Q7 se bloque et isole R et Q8 du reste du circuit. Par
ailleurs, des résistances d'émetteur sont prévues
pour Q3 et Q4 afin de minimiser l'effet des
dispersions des transistors PNP. Un miroir de
courant à transistors PNP Wilson accompagné d'un
circuit permettant la compensation de la différence
entre les courants I1 et I2 ont été ajoutés dans le but
d'améliorer la précision.
Q1
Q5
Q2(N)
R1
Vdd
R3
Q3 Q4
R4
Vout=Vbg
R8
Q8
Q7
R
R5 R6
C1
R2
R9
R10
R11
R7
Q9
Q9
I2I1
Figure 6. Schéma complet du bandgap amélioré
5 Résultats et commentaires
Le régulateur a été réalisé en technologie AMS
BiCMOS 0,8µm. Cet ASIC représenté sur la figure 7
occupe une surface de Si ne dépassant pas 2mm2.
Figure 7. Micrographie du régulateur low dropout
La consommation totale du circuit est de 216 µA. La
simulation du bandgap de la figure 6 a permis de
prévoir une tension de référence de 1.19V à 37°C avec
une dérive de 5.6 ppm/°C sur la gamme de
température [25°C- 45°C].
Par ailleurs, la variation de cette tension en fonction
de la variation de la tension d'alimentation V
dd est
de 340 ppm/V sur la plage de variation de
l'alimentation à induction.
Les caractéristiques simulées du régulateur
complet sont données au tableau 1 :

SETIT2005
Vout 4V
Régulation en ligne 49.10-3
Régulation en charge 22mV @ Io = 7mA
?V
out / ?T 90ppm/°C
Vin – Vout @ Iload = 5mA 245mV
I polarisation 240µA
PSRR 56dB
?V
out @ ? Iload = 12mA 140mV
Tableau 1 : Caractéristiques du régulateur
La figure 8 représente la chute de tension simulée
en fonction du courant de charge délivré au circuit
secondaire. Comme nous pouvons le constater sur
cette figure, cette chute ne dépasse pas 245mV pour
un courant de 5mA.
Par ailleurs, le système de modulation produit une
surconsommation de courant de 12mA à chaque
émission de données. Nous avons donc simulé la
chute de tension que provoque une impulsion de
courant d’amplitude 12mA et de durée 15 µS en
sortie du régulateur : Cette chute ne dépasse pas
140mV.
0
25
50
75
100
125
150
175
200
225
250
0 1 2 3 4 5
Is (mA)
Drop-out (mV)
Figure 8. Chute de tension en fonction du courant de charge
Conclusion
Ce travail a montré la possibilité de réaliser un
régulateur linéaire à faible chute de tension au
moyen d’un ballast NMOSFET associé à un
doubleur de tension. Cette topologie présente en
outre une bonne stabilité avec une précision
équivalente à la précision du bandgap qui lui est
associé (340ppm/V). Bien que ce circuit soit dédié à
la régulation de la tension de sortie d’une
alimentation par induction magnétique, son
principe peut être étendu au conditionnement
d’une source de tension continue. Il suffit pour cela
de remplacer le doubleur de tension par un
convertisseur à découpage.
Références
(AMS, 1995) AMS, "0,8µM BiCMOS process parameters",
Austria micro Systems international A.G., 1995
(Gray & al, 1982) P.R. Gray, R.G. Meyer, “MOS operational
amplifier design – a tutorial overview”, IEEE Journal of
Solid-State Circuits, Vol. SC 17, No. 6, pp. 969-982,
December 1982.
(Grebene, 1987) A.B.Grebene, "Bipolar and MOS analog
integrated circuit design", John Wiley & Sons, NewYork,
pp.551-591, 1987.
(Rincon-Mora, 1998) G.A. Rincon-Mora, "A low-voltage,
low quiescent current, low drop-out regulator", IEEE J.
Solid-State Circuits, vol. 33, N°. 1, pp. 36-43, January
1998.
(Simpson, 1996) C. Simpson, "LDO regulators require proper
compensation", Electronic design, pp. 99-104, November
4, 1996.
1
/
5
100%