Programmation TPP

Programmation en TPP
Robot Fanuc LR Mate 200iC
Hassan Bensalah, PhD., M.Sc.A.

Type de langage utilisés
TPP: Teach Pendant Programming;
Langage interprété; la syntaxe est automatiquement contrôlée
lors de la création.
Langage KAREL ;
Les sources sont développées et compilées sur PC puis transférées
dans le contrôleur;
Nécessité de connaître le langage TPP au préalable.
Langage Ladder pour PMC (Programmable Machine
Control);
équivalent du PLC GE Fanuc;
Nécessité de connaître le langage TPE au préalable.

Structure du Programme(TPP)
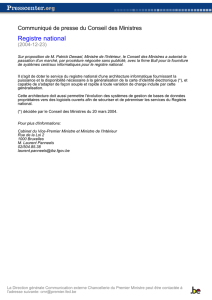
Un programme contient les instructions suivantes:
Instruction de mouvement;
Instruction de registre;
Instruction de registre de position;
Instruction entrée/sortie;
Instruction de branchement;
Instruction d’attente;
Instruction commentaire;
Instruction de fin de programme;
Autres instructions.

Exemple d’un programme

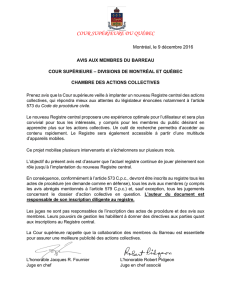
Configuration des systèmes de coordonnées
Système de coordonnées joint:
La position et l’attitude du robot sont définies par des
déplacements angulaires.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%