n - LaBRI

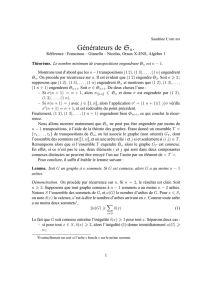
Chapitre VIII.
Introduction aux graphes
Définitions
Structures de données
Connexité
Arbre couvrant de poids minimal
Parcours des graphes orientés

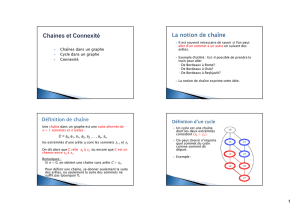
Définitions
Graphes orientés
•Un graphe orienté :
•- ensemble des sommets
•- ensemble des arcs : relation binaire
sur N
•Exemple :
),( ANG
i
nN
ji nnA ,
1
2 3
4
N=?, A=?

Arcs et sommets
jiij nna ,
i
n
j
n
-l’extrémité initiale (début)
-l’extrémité terminale (fin)
est un prédécesseur de
est un successeur de
j
n
j
n
j
n
j
n

Etiquettes
•Etiquettes
• Le nom d’un sommet doit être unique dans un
graphe
•Plusieurs sommets peuvent avoir la même
étiquette
1 2
Anne Claude
Est fille de

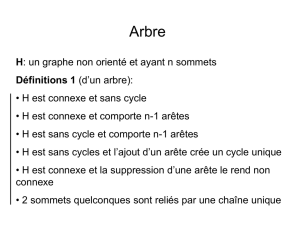
Chemins
•Un chemin dans un graphe orienté est une liste
• La longueur d’un chemin est k-1 = nbr arcs
faisant partie du chemin
•Le cas trivial k=1: tout sommet n isolé est un
chemin de longueur zéro de n à n
1,...,1,,:,...,121
kiAnnnnn iik
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%