Modèles de Markov Cachés

Modèles de Markov
Cachés
Adapté de source glanées sur l’Internet :Yannis Korilis, Christian St-Jean,
Dave DeBarr, Bob Carpenter, Jennifer Chu-Carroll et plusieurs autres

Modèles de Markov Cachés
La séquence observée est l’évidence d’une chaîne de Markov
sous-jacente cachée
s1s2s1s3s2s2s1
Etat interne
(caché)
Observations PS N
S P
SS
L’émission d’un état observé n’est pas déterministe ! Chaque état caché
émet, de manière aléatoire, un parmi N symboles d’un alphabet

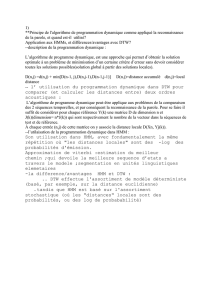
Exemple
Trames sonores représentatives de trois mots
différents
pad
bad
spat
Mot sous jacent signal sonore observable

Composantes d’un MMC (« HMM »)
Les probabilités initiales des états cachés ={i=P(si)}
Le modèle de transition des états cachés
L’alphabet ={s1,...,sm} décrivant les états cachés
La matrice des probabilités de transitions entre eux A={aij= P(sj|si)}
Le modèle d’observation des symboles émis par les états cachés
L’alphabet ={o1,...,ok} des symboles émis par les sipour un HMM discret
Les probabilités d’émission B={bi(ok)=P(ok|si)}
s2
s1
s3
A
b1(.)
b2(.)
b3(.)
On suppose généralement un
processus stationnaire (les
probabilités ne dépendent pas
du temps)

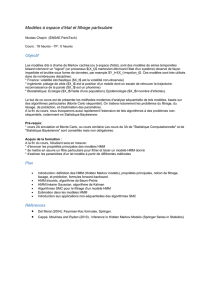
Exemple de HMM
Printemps Hiver
Eté
0.25
0.25
0.25
États :
={‘Printemps’, ‘Été ’,‘Automne’, ‘Hiver’}
A={aij}
Symboles observables émis par chaque état
={‘N’, ‘P ’, ‘S’}
B={bj(.)} : loi multinomiale
Automne
0.25
N=0.1
P=0.45
S=0.45
N=0.2
P=0.5
S=0.3
N=0.01
P=0.13
S=0.86
N=0.05
P=0.55
S=0.4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%