techniques d`analyse des activités posturo

TECHNIQUES D’ANALYSE DES ACTIVITÉS
POSTURO-CINÉTIQUES
Laboratoire de Physiologie, Faculté de Médecine, 133 route de Narbonne,
31062 Toulouse Cedex
Dr Philippe DUPUI, Maître de Conférence de Physiologie,
Praticien Hospitalier, Neurologue,
Responsable du DIU de Posturologie Clinique et du
DU de Biologie, Physiologie et Médecine Spatiales.
Service d’Explorations Fonctionnelles Sensorielles et Motrices, CHU, Hôpital
de Rangueil, 1 avenue Jean-Poulhès, TSA 50032, 31059 Toulouse cedex 9

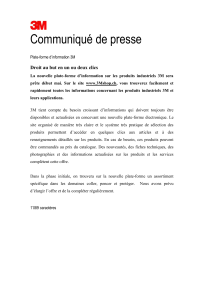
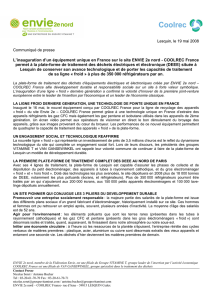
Extenseurs de la tête
Extenseurs du tronc
Extenseurs de la cuisse
Extenseurs de la jambe
Extenseurs du pied
POSTURE –TONUS MUSCULAIRE - GRAVITÉ
M. de l’occlusion mandibulaire

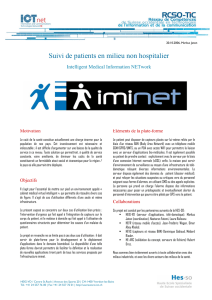
SYSTÈME VISUEL
Récepteurs de
la rétine
SYSTÈME
PROPRIOCEPTIF
Récepteurs articulaires
Récepteurs musculaires
Récepteurs m. oculaires
SYSTÈME TACTILE
Pressocepteurs de la
sole plantaire
INTÉGRATION
CENTRALE
- Nx Vestibulaires
- Nx Oculo-moteurs
- Cervelet
- Nx Gris
- Cortex
- Centres Végétatifs
CORTEX
PARIÉTO-
TEMPORAL
ORIENTATION SPATIALE
- Sens de la position et de la
vitesse du corps.
- Seuil de perception des
accélérations linéaires.
CENTRES
VÉGÉTATIFS
BULBAIRES
CORTEX LIMBIQUE
SIGNAL DE CONFLIT
SENSORIEL
- Apparition de cinétoses.
TRONC
CÉRÉBRAL
COORDINATION TÊTE/ŒIL
- Oculomotricité conjuguée,
- Réflexes visuo-oculomoteurs (N.O.C.)
- Réflexes vestibulo-oculaires (V.O.R.)
- Réflexes cervico-oculaires.
- Mvts oculaires (saccade poursuite).
MOELLE
ÉPINIÈRE
CONTRÔLE DE LA POSTURE,
DE L'ÉQUILIBRE STATIQUE ET
DYNAMIQUE
- Voies Vestibulo-spinales
LABYRINTHE
CANAUX SEMI-
CIRCULAIRES
Accélérations angulaires
OTOLITHES
Accélérations linéaires
Vecteur gravitationnel "G"
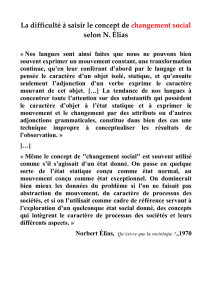
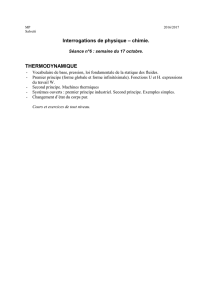
LES DIFFÉRENTS SYSTÈMES SENSORIMOTEURS ET LES
DIFFÉRENTS NIVEAUX D'INTÉGRATION CENTRALE
IMPLIQUÉS DANS LE CONTRÔLE
DES ACTIVITÉS POSTURO-CINÉTIQUES

ELLE EXAMINE LA CONTRIBUTION DU RÉFLEXE VESTIBULO-SPINAL AU
MAINTIEN DE LA POSTURE ET DE L'ÉQUILIBRE.
POSTUROGRAPHIE
MÉTHODE D'INVESTIGATION ATRAUMATIQUE, PEU CONNUE.
ENREGISTRE ET QUANTIFIE LA FONCTION D'ÉQUILIBRATION STATIQUE ET
DYNAMIQUE.
APPROCHE GLOBALE DES SYSTÈMES SENSORI-MOTEURS IMPLIQUÉS
DANS LA RÉGULATION DE LA POSTURE ET DE L'ÉQUILIBRE.

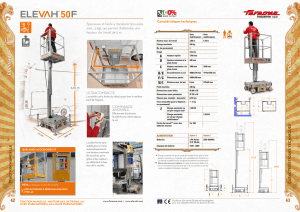
POLYGONE DE SUSTENTATION DÉPLACÉ ET/OU DÉFORMÉ
ÉQUILIBRE STATIQUE - ÉQUILIBRE DYNAMIQUE
ÉQUILIBRE STATIQUE :
CONTRACTIONS MUSCULAIRES TONIQUES PRESQUE ISOMÉTRIQUES
POLYGONE DE SUSTENTATION NI DÉPLACÉ NI DÉFORMÉ
MAINTIEN DE LA POSITION ORTHOSTATIQUE : POSITION FONDAMENTALE
ANTI-GRAVITAIRE DE L'ESPÈCE HUMAINE
ÉQUILIBRE DYNAMIQUE :
- MVTS INTENTIONNELS (ex : marche)
- SOUS L'ACTION DE FORCES EXTÉRIEURES.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
1
/
43
100%