Arbre de plus court chemins

1
CSI2510
Structures de données et
algorithmes
Plus court chemin
1

Graphe pondéré
Les poids des arêtes d’un graphe représentent des
distances, des coûts, etc.
Exemple d’un graphe pondéré non-orienté:
Dans un graphe des route aériennes, le poids d'une
arête représente la distance en miles entre les
aéroports de chaque extrémité
ORD PVD
MIA
DFW
SFO
LAX
LGA
HNL
2
CSI2510 -- PCC

Plus court chemin
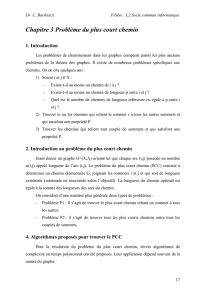
Étant donné un graphe pondéré et deux sommets u
et v, nous voulons trouver un chemin de poids total
minimal entre uet v
Applications
Les réservations de vol
Directions de conduite
Routage des paquets d‘Internet
Exemple:
Plus court chemin entre Providence et Honolulu
ORD PVD
MIA
DFW
SFO
LAX
LGA
HNL
3
CSI2510 -- PCC

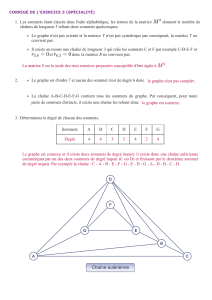
Propriétés
Propriété 1:
Un sous-chemin d’un plus court chemin est aussi un plus court
chemin
Propriété 2:
L’ensemble des plus courts chemins d’un sommet à tous les
autres sommets forme un arbre
Exemple:
Un arbre des plus courts chemins de Providence
ORD PVD
MIA
DFW
SFO
LAX
LGA
HNL
4
CSI2510 -- PCC

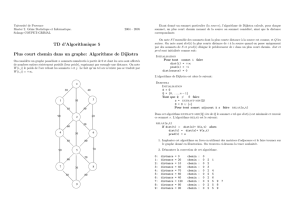
Algorithme de Dijkstra
La distance entre un sommet vàun autre sommet
sest la longueur du plus court chemin entre set v
L’algorithme de Dijkstra calcule la distance entre
un sommet donnée sde départ et tous les autres
sommets
Suppositions:
Le graphe est connexe
Les arêtes sont non-orientées
Les poids des arêtes sont non-négatifs
5
CSI2510 -- PCC
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%