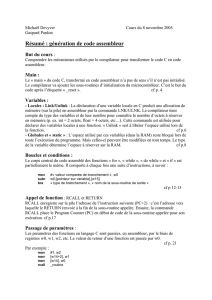
Architecture interne du microprocesseur 8086.

Jelassi Khaled Microprocesseurs 1
Architecture interne du
microprocesseur 8086.
Bus d'adresse:
Le 8086 utilise un bus d'adresse de 20 bits, ce qui lui permet d'atteindre 220 = 1M
cases mémoire de 1 octet chacune. Les 16 bits de poids faible du bus d'adresse
sont multiplexés avec les 16 bits du bus de données, alors que les 4 bits de poids
fort sont eux aussi multiplexés avec 4 bits de statut.
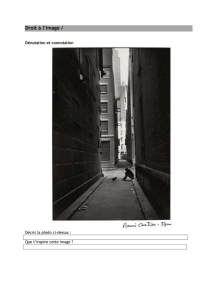
Organisation de l'espace adressable.
numéro de segment
(16 bits)
déplacement (16 bits)
0 0 0 0
adresse physique 20 bits
+
=

Jelassi Khaled Microprocesseurs 2
Mode d’adressage
Mode d’adressage
•Les instructions peuvent avoir 0, 1, ou 2 opérandes.
Exemples :
Instructions sans opérande: NOP,STI,CLI,PUSHF,CBW...;
Instructions avec une seule opérande: INC,DEC,NEG,NOT ....;
Instructions avec deux opérandes: CMP,ADD,MOV,LEA,XCHG,AND ......
Une opérande peut se trouver dans un registre du 8086, dans un octet,
dans un mot 16 bits ou dans un double mot 32 bits.
Les opérations peuvent avoir lieu:
entre un registre et un autre registre,
entre un registre et un octet ou un mot en mémoire mais pas entre 2 octets ou 2
mots en mémoire (il faut passer dans ce cas par un registre). Toutefois les
instructions de mouvement de chaînes d'octets effectuent "directement" le
transfert de mémoire à mémoire (octet par octet ou mot par mot), l'adressage se
faisant par les registres DS:SI et ES:DI.

Jelassi Khaled Microprocesseurs 3
Mode d’adressage
Les instructions de transfert
adressage registre à registre.
Exemple: MOV AX, BX ; opérandes 16 bit
ADD CH, DL ; opérandes 8 bits
adressage immédiat.
Exemples: MOV AX, 0A1EBH ; AX:= valeur hexa A1EB
ADD CL, 25 ; CL:= CL + 25
OR AH,11000000 ; forcer les 2 bits de fort poids de AH à 1
adressage direct.
Exemples: MOV BX,Total
MOV DX,ES:Nom
adressage indirect (ou basé).
Exemples: MOV AX,[BX]
MOV AX,[BP]
adressage indexé.
Exemple: MOV AX,Tab[SI]
adressage indirect indexé (ou basé indexé).
Exemples: MOV AX,[BX][SI] ; relatif a DS
MOV AX,[BP][SI] ;Relatif a SS
adressage basé indexé avec déplacement.
Exemple: MOV AX,Compte[BX][SI]

Jelassi Khaled Microprocesseurs 4
Les Principales Instructions de
l’assembleur
L’instruction LEA
Exemples: LEA BX,Tableau ;chargement de l’adresse de Tableau
LEA BX,Tableau[SI]
L'instruction XCHG.
Exemple: XCHG AX,Somme ;échange des contenus de AX et de Somme
Les instructions PUSH et POP
Exemple: PUSH SI ;empile le contenu de SI
Les instructions arithmétiques
Les instructions d'additionADD et ADC.
Exemples:
ADD AX,BX ;AX reçoit AX + BX
ADD AX,0F00H ;ces 2 instructions additionnent la
ADC DX,0 ;valeur immédiate 0F00H à la paire de
;registres DX:AX (32 bits).
Les instructions de soustraction SUB et SBB.
SUB AX,DX ;AX reçoit AX-DX
SBB SI,100 ;SI reçoit SI-100 - Carry

Jelassi Khaled Microprocesseurs 5
Les Principales Instructions de
l’assembleur
Les instructions de multiplication: MUL et IMUL
Exemples:
MUL CL ; AX:=AL * CL résultat sur 16 bits
IMUL CX ; DX:AX:= AX * CX résultat sur 32 bits non signe
Les instructions de division: DIV et IDIV
Exemples:
IDIV BX ;DX:AX est divisé par BX, le reste est dans DX et le quotient dans AX
DIV BL ;AX est divisé par BL, le reste est dans AH, le quotient dans AL.
Les instructions de décalage et de rotation
Les instructions de décalage gauche :SHL Opérande,Nombre
Opérande: Opérande = registre / case mémoire
Nombre: Nombre = soit la valeur 1, soit la valeur contenue dans CL
Les instructions de décalage droite :SHR Opérande,Nombre
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%