LES MOTEURS PAS A PAS


MOTEUR A AIMANT PERMANENT 1/5
-d’une partie fixe (stator)
constituée de deux noyaux
ferromagnétiques.
-d’une partie mobile (rotor) constituée par
un aimant. NS
Sur ces noyaux, on trouve des bobines;
ce sont donc des électroaimants. On
peut légèrement augmenter le nombre
d’électroaimants (3 ou 4) afin
d’obtenir une meilleure résolution.
Elle est cependant limitée.
N S
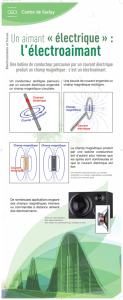
Lorsqu’un courant électrique traverse une
bobine, un champ magnétique est créé (règle
du « tire-bouchon »).Le rotor s’aligne sur
l’électroaimant.Le couple est assez élevé.
Le moteur se compose :


MOTEUR A AIMANT PERMANENT 3/5
Mode Plein pas
Fonctionnement sur deux phases (couple maximal)
Les bobines sont alimentées
simultanément.
Pour une rotation dans le sens
horaire, la séquence est :
B1 B2
I+ I+
I- I+
I- I-
I+ I-
Si l ’on veut changer le sens de rotation, on inverse l’ordre de la séquence.
B1
B2
N S
S
N
N S
N
S
S N
N
S
S
N
S N
N S
S
N

MOTEUR A AIMANT PERMANENT 4/5
Mode Demi-pas
Le fonctionnement est une fusion
des deux précédents. On alterne
l’alimentation d’une phase et de
deux phases. B1
B2
Pour une rotation dans le sens
anti-horaire, la séquence est :
B1 B2
0 I-
I- I-
I- 0
I- I+
Si l ’on veut changer le sens de rotation, on inverse l’ordre de la séquence.
0 I+
I+ I+
I+ 0
I+ I-
S N
N
S
S N
N
S
N
S
N
S
N S
N
S
N S
NS
N S
S
N
N
S
S
N
S
N
S N
S N
N
S
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%