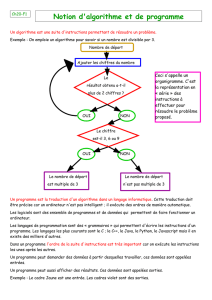
Microprocesseurs hautes performances

1
Microprocesseurs
Hautes
Performances
André Seznec
IRISA/INRIA
http://www.irisa.fr/caps

2
N’oubliez pas
Pour comprendre l’architecture,
il faut une vision minimale
du contexte technologique
mais aussi économique
Contexte technologique
=
Cible mouvante
Contexte économique
« Intel est le plus fort »

3
«Loi » de Moore
Le nombre de transistors sur un micro-processeur double tous les 18 mois
1972: 2000 transistors (Intel 4004)
1979: 30000 transistors (Intel 8086)
1989: 1 M transistors (Intel 80486)
1999: 130 M transistors (HP PA-8500)
Les performances des processeurs doublent tous les 18 mois:
1989: Intel 80486 16 Mhz (< 1inst/cycle)
1993 : Intel Pentium 66 Mhz x 2 inst/cycle
1995: Intel PentiumPro 150 Mhz x 3 inst/cycle
06/2000: Intel Pentium III 1Ghz x 3 inst/cycle
09/2001: Intel Pentium 4 2 Ghz x 3 inst/cycle

4
Quelques repères (sept. 2001)
Fréquence : 700 Mhz à 2 Ghz
Durée d'une opération ALU: 1 cycle
Durée d'une opération flottante : 3 cycles
Lecture/écriture dans un registre : 1-3 cycles
souvent un chemin critique ...
Lecture/écriture du cache L1: 1-2 cycles
dilemme taille-associativité-temps d ’accès

5
Quelques repères (2001)
L'intégration : 0.25m, 0.18m, 0.125m(fin 2001)
10 à 20 millions de transistors de logique
Le reste en mémoire cache: jusqu'à 100 millions de
transistors
20 à 75 Watts
> 100 W bientôt
400 à 600 broches
> 1000 bientôt
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
1
/
124
100%