Composants programmables - Université de la Nouvelle

Licence SPI 2ème année Thomas Quiniou 1
Informatique industrielle
Les circuits programmables
(Langage de description VHDL)
Les micro-contrôleurs
(Langage assembleur, C, C++,
basic
)
Systèmes embarqués
(RaspBerry Pi, BeagleBone Black)
Les DSP

Licence SPI 2ème année Thomas Quiniou 2
Plan
• Introduction
• Quelques Rappels
– Les différentes bases de numération (bin, déc, hex)
– Représentation des nombres (entiers, flottants)
– Logique combinatoire et séquentielle
• Les différents types de composant
– Les circuits Logiques Programmables (PLD) – Langage de description VHDL
– Les DSP
– Les µContrôleurs (assembleur, basic, C, C++)
– Les cartes mini-PC type BeagleBone black (OS Linux)
• Les µcontrôleurs PIC
• Le µcontrôleur PIC 18F45K22
• La platine de développement EasyPic7 de chez Lextronics
– La carte et ses différents modules
– L’environnement de développement
• Langage C embarqué sur µcontrôleur

Licence SPI 2ème année Thomas Quiniou 3
Software (SW) : logiciel (matière molle)
Hardware (HW) : matériel (matière dure)
Firmware (FW) : micrologiciel (matière ferme)
Le mot firmware est une combinaison des mots software (programme
informatique) et firm (« ferme », état intermédiaire entre soft et hard).
Désigné comme logiciel système, logiciel embarqué ou d'exploitation, le FW
est un logiciel intégré dans un composant matériel, plus exactement dans sa
mémoire. Il assure le fonctionnement du composant.
Les composants programmables

Licence SPI 2ème année Thomas Quiniou 4
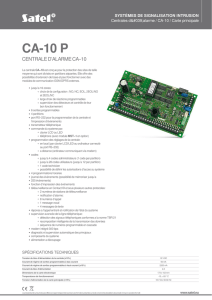
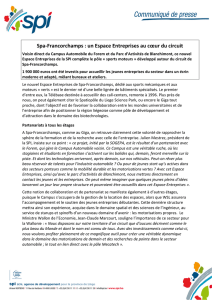
Il existe différents types de circuits numériques que l’on peut classer de
différentes manières. L’une d’entre elles est la suivante :
Les différentes composants
programmables
Les composants qui vont principalement nous intéresser ici sont les µprocesseurs
et les circuits à architecture programmable (FPGA).

Licence SPI 2ème année Thomas Quiniou 5
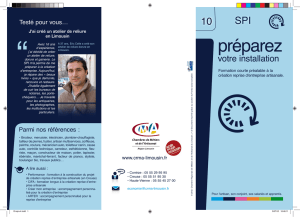
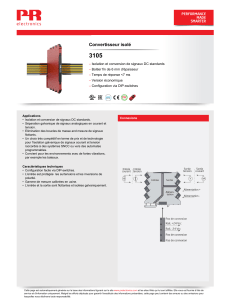
Circuits logiques standards : il s’agit de circuits intégrés logiques qui réalisent des
fonctions booléennes. Ces circuits ne sont donc pas programmables.
Les différentes composants
programmables
Avantages : faible prix unitaire (prototypage), disponibilité « sur étagère », fiabilité
éprouvée, sources multiples
Inconvénients : taille du circuit, cout pour les grandes séries, pas d’optimisation
possible
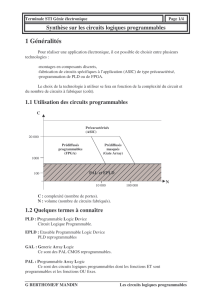
Exemple : 74HC00
4 portes NAND à 2 entrées Implantation sur carte
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
1
/
38
100%