Cours 2. Inverseur CMOS en mode courant - SoC

university-logo
Logique en mode courant : principes
Transistor MOS
Analyse d’inverseur en mode grand signal
Analyse petit signal
Réalisation de la charge
Fréquence d’oscillations
Polarisation : considérations élémentaires
Cours 2. Inverseur CMOS en mode courant
Dimitri Galayko,
dimitri.galayk[email protected]
LIP6
University of Paris-VI
France
Cours IP-AMS
ACSI M2
Novembre 2009
1/46

university-logo
Logique en mode courant : principes
Transistor MOS
Analyse d’inverseur en mode grand signal
Analyse petit signal
Réalisation de la charge
Fréquence d’oscillations
Polarisation : considérations élémentaires
Outline
1Logique en mode courant : principes
2Transistor MOS
3Analyse d’inverseur en mode grand signal
4Analyse petit signal
5Réalisation de la charge
6Fréquence d’oscillations
7Polarisation : considérations élémentaires
2/46

university-logo
Logique en mode courant : principes
Transistor MOS
Analyse d’inverseur en mode grand signal
Analyse petit signal
Réalisation de la charge
Fréquence d’oscillations
Polarisation : considérations élémentaires
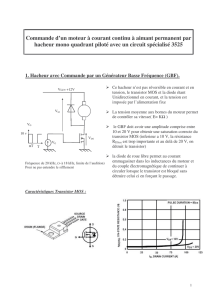
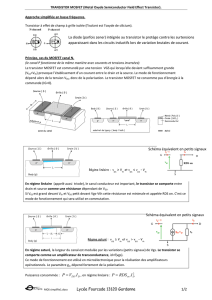
Logique en mode courant
Circuit idéal : inverseur/suiveur
Vdd Vdd Partie droitePartie gauche
V dd C
R
I
t= 0
R
R
V dd C
R
t
”0” ”1”
A t¿0 (apr`es la commutation) :
CC
Vout
Vout
Vout
Vout
Vout
Vout
Vdd
Vdd −RI
La transistion est exponentielle, avec une constante de temps de RC.
3/46

university-logo
Logique en mode courant : principes
Transistor MOS
Analyse d’inverseur en mode grand signal
Analyse petit signal
Réalisation de la charge
Fréquence d’oscillations
Polarisation : considérations élémentaires
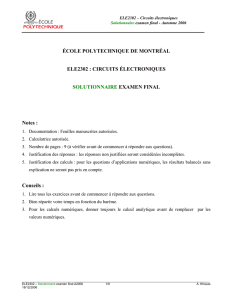
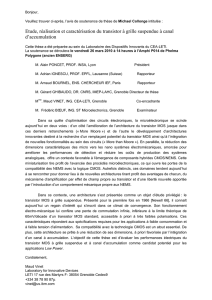
Logique en mode courant
Réalisation pratique
Vdd Partie gauche
NMOS
Vdd
PMOS
Zone ohmique
Zone de saturation
Vdd
R=V n bias
=
Le transistor est ici en r´egime de saturation.
V p bias
V p bias Vin
Vin
V n bias
t
Le transistor est ici en r´egime ohmique.
Vout Vout
Ici le gain diff´erentiel est n´egatif,
d´efinie en cons´equence
la tension de sortie differentielle est
4/46

university-logo
Logique en mode courant : principes
Transistor MOS
Analyse d’inverseur en mode grand signal
Analyse petit signal
Réalisation de la charge
Fréquence d’oscillations
Polarisation : considérations élémentaires
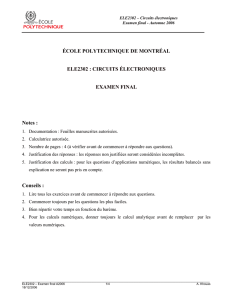
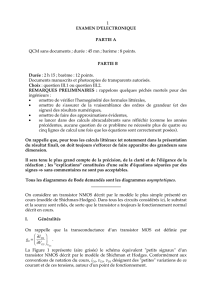
Exemple d’une cellule logique complexe (1)
Arbre de décision pour AB
A
B
01
1
1
0
0
La sortie
5/46
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%