1.3/ Régulateur Proportionnel 1.4/ Régulateur intégr ateur

Page 37
1.3/
Régulateur
Proportionnel
C’est lui qui va fixer la rapidité de la boucle vitesse.
1.3.1/
Schéma
du
régulateur
P
Nous invitons le lecteur à se reporter à la fig 13.
1.3.2/
Fonctionnement
Le montage permet l’ajustage du terme proportionnel, de gain KpN, par la position du
curseur du potentiomètre PpN .
La relation pour le régulateur P est la suivante :
VpN R7 k PpN
R7 R6 PpN R57
R33 VeN KpN VeN= −
+ ×
+ + × × = − ×
L’architecture permet de faire varier le gain KpN en toute sécurité ( butée par R7 ).
1.4/
Régulateur
intégr
ateur
Il permet d’éliminer l’erreur statique entre la consigne et la sortie .
1.4.1/
Schéma
du
régulateur
I
Nous invitons le lecteur à se reporter à la fig 14 .
1.4.2/
Fonctionnement
Le montage permet l’ajustage du terme intégral, de gain KiN, par la position du curseur du
potentiomètre PiN.
La relation pour le régulateur I est la suivante :
ViN R9 k PiN
R9 PiN R8 1
R124 C44 p VeN KiN
pVeN=+ ↔
+ + ↔↔ ↔ ↔ = − ↔
L’architecture permet de faire varier le gain KiN en toute sécurité (butée par R9).
1.4.3/
R.A.Z
du
régulateur
I
On utilise un transistor F.E.T pour supprimer l’action intégrale(décharge du condensateur
C44) lorsque le variateur est verrouillé.
En effet, il est indispensable d’imposer une RAZ non seulement pour réduire la durée du
phénomène transitoire au moment de la mise en marche, mais surtout parceque une valeur initiale
sur la tension condensateur C44 pourrait provoquer une surcharge temporaire du variateur.

Page 38
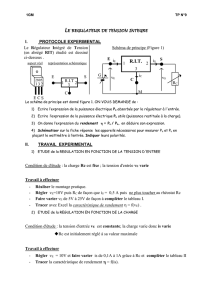
Fig 13
Régulateur
proportionnel

Page 39
Fig 14
Régulateur
intégral
avec
limitation
incorporée

Page 40
1.5/ Régulateur PI avec limitation incorpor ée
La limitation doit également intervenir sur la composante intégrale du régulateur sinon l’intégrateur
continue à intégrer un écart de réglage élevé.
1.5.1/ Limitation avec diodes en contre-r éaction sur la co mposante int égrale
Le limiteur n’entre en fonction que lors d’une surcharge ou, ce qui est le plus fréquent, pendant des
phénomènes transitoires, lors de grandes et brusques variations pendant le démarrage et le freinage.
En fonctionnement normal, le limiteur est inopérant et n’a aucune influence sur le fonctionnement du
régulateur I.
Considérons le schéma de la figure 14 (page 39).
Fonctionnement
Dès que la tension de sortie du régulateur I devient supérieure (respectivement inférieur)
la diode D14 (respectivement D13) devient passante et impose la valeur VImax ( respectivement
- VImax) en sortie du régulateur I.
Réglage
Le réglage de la valeur maximale du courant se fait par la position du curseur du potentiomètre POT
Imax , avec une sécurité minimale ( butée par R11).
1.5.2/ Rôle des 2 diodes D18-D19 en anti-parall èle
Sans diodes
Examinons tout d’abord les caractéristiques de limitation lors d’une variation brusque de l’écart de
vitesse .
t
t
t
t
VC44
Vima
x
-
Vimax
Ve
N
Vi
N

Page 41
Ce temps de retard peut être néfaste pour la stabilité du circuit de réglage lors de grandes
variations.
Avec diodes en parallèle
Lors de grandes variations et intervention de la limitation, elles limitent la tension d’entrée
de l’amplificateur opérationnel à ±0,6 V.
Nous constatons que le retard a été éliminé d’une part et d’autre part la tension aux bornes
du condensateur C44 reste donc limitée en relation avec la limitation sur la tension de sortie.
En fonctionnement normal l’amplificateur opérationnel fonctionne en linéaire, la tension
d’entrée est donc très faible: les diodes en anti-parallèle sont alors bloquées et n’ont aucune
influence sur le fonctionnement du régulateur.
1.5.3/
Retard introduit par la limitation de la composante intégrale
Examinons tout d’abord les caractéristiques de la limitation de la composante intégrale à
l’entrée de la boucle de courant lors d’une variation brusque de l’erreur de vitesse.
t
t
t
VC44
Vimax
- Vimax
VeN
ViN
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%