Partie 1 - Le site de Kifouche Rezki

Cours technologie des systèmes II LACA09
1
Rappel du cours technologies de systèmes II (Partie 1)
Sommaire :
1 Mesure des grandeurs mécaniques :
1.1 Importance et intérêt.
1.2 Mesure de position et de déplacement
1.2.1 Méthodes indirects (par variation d'impédance)
1.2.1.1 Capteur potentiomètrique : à fil bobiné, à couche résistive
1.2.1.2 Capteur inductif : à entrefer, à noyau plongeur
1.2.1.3 Capteur capacitif : à armature mobile, à variation de surface.
Introduction
Objet et importance de la mesure industrielle :
Les capteurs et la chaîne d'acquisition sont au cœur de beaucoup de systèmes industriels. Un
capteur est un élément déterminant de la chaîne d'information et un mauvais choix de capteurs
peut avoir de sérieuses conséquences économiques.
Les capteurs sont les premiers éléments rencontrés dans une chaîne de mesure. Ils
transforment les grandeurs physiques ou chimiques d’un processus ou d’une installation en
signaux électriques au départ presque toujours analogiques. Cette transformation doit être le
reflet aussi parfait que possible de ces grandeurs. Cet objectif n’est atteint que si l’on maîtrise
en permanence la réponse des capteurs qui peut être affectée par des défauts produits par les
parasites qui se superposent aux signaux, par les conditions d’utilisation, par le processus lui-
même et par le milieu qui l’entoure.
La grandeur électrique et ses variations, délivrée par le capteur, apporte toute l’information
nécessaire à la connaissance du mesurande.
Ils contribuent :
A la sécurité des personnes et des équipements lors de l'exécution des opérations
Au bon déroulement des taches, étant au cœur des systèmes de commande et de
régulation.
A l'augmentation de la productivité et à l'amélioration de la qualité des produits finis.
Classification des grandeurs industrielles :
On peut classer les grandeurs physiques en 6 familles, chaque capteur s’associant à l’une de
ces 6 familles :
Mécanique : déplacement, force, masse, débit etc…
Thermique : température, capacité thermique, flux thermique etc...
Electrique : courant, tension, charge, impédance, diélectrique etc…
Magnétique : champ magnétique, perméabilité, moment magnétique etc…
Radiatif : lumière visible, rayons X, micro-ondes etc...
(Bio)Chimique : humidité, gaz, PH, sucre, hormone etc…

Cours technologie des systèmes II LACA09
2
I. Mesure des grandeurs mécaniques :
I.1 Capteurs de position et de position
I.1.1. Utilisation des capteurs de position et de déplacement :
Ces capteurs sont utilisés pour mesurer la position linéaire ou angulaire d'un mobile par
rapport à un point de référence connu, essentielles dans certaines applications (ex. machines
outils)
De nombreuses grandeurs physiques sont aussi mesurables par les déplacements qu'elles
imposent à des corps d'épreuve :
force
pression
accélération
température
Mesure de position :
Les capteurs utilisés pour ces types de mesure sont très fréquemment des capteurs passifs.
I.1.2 Méthodes indirects (par variation d'impédance)
I.1.2.1 Capteurs potentiométriques :
L'objet dont on désire mesurer la position ou le déplacement, est rendu solidaire
mécaniquement du curseur du potentiomètre.
Ce type de capteur, facile à mettre en œuvre et bon marché donne une mesure absolue du
déplacement linéaire ou angulaire. Ils génèrent un signal (tension) qui est directement
exploitable par une unité de contrôle commande. Cependant ils sont relativement fragiles et
les plages de mesure sont limitées.
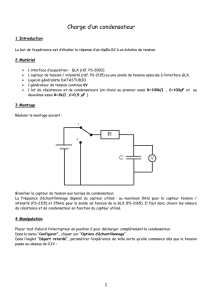
Si on applique une tension continue E aux bornes du potentiomètre, la tension V mesurée est
proportionnelle au déplacement de l'objet.
d : est le déplacement de l'objet.
Figure 2: Schéma d'un potentiomètre de
déplacement rectiligne

Cours technologie des systèmes II LACA09
3
α : est l'angle de déplacement de l'objet.
I.1.2.2 Avantages et inconvénients des capteurs potentiométriques :
Avantage :
- simplicité
- peu coûteux
- angle de mesure 10° à 360°
- la sortie est indépendante de R => stable par rapport à la température
Inconvénients :
- charge mécanique
- usure par frottements
- influence de la source
- influence de l'appareil de mesure. solution : amplificateur suiveur pour garantir
la validité de l'utilisation du diviseur de tension
I.1.2.3 Capteurs inductifs :
Le déplacement que l'on veut mesurer est imposé à un des éléments d'un circuit magnétique
entraînant une variation de flux dans un enroulement de mesure.
Le coefficient d'auto-induction L d'une bobine de N tours de fl s'exprime en fonction de la
réluctance R du circuit magnétique associé :
ou
μ étant la perméabilité magnétique et s la section du circuit.
Figure 3: Schéma d'un potentiomètre de
déplacement angulaire

Cours technologie des systèmes II LACA09
4
Quand les sections des différents tronçons du circuit magnétique sont constantes :
avec :
et sont respectivement la longueur moyenne d'une ligne de force dans le matériau
ferromagnétique et dans l'air;
et sont les sections droites du circuit magnétique et de l'entrefer
la perméabilité magnétique relative du matériau ferromagnétique
(MKSA)
On distingue plusieurs familles selon le principe utilisé :
Capteur de variation d'entrefer d'un circuit magnétique,
Capteur à noyau plongeur
Capteur par variation de mutuelle inductance entre deux circuits;
Les deux premiers cas vont donner des capteurs de proximité et de déplacement. Le troisième
principe est utilisé par les capteurs dit à transformateur différentiel (LVDT)
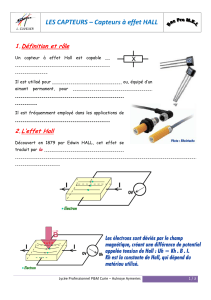
I.1.2.3.1 Capteurs inductifs à variation d'entrefer :
Un circuit magnétique comporte une partie fixe C et une culasse mobile M susceptible de se
déplacer par translation et de modifier l'entrefer
L'expression du coefficient d'auto-induction, ou l'inductance, est :
Si donc :
, on divisant sur on obtient :
Entrefer variable
Figure 4: Principe d'un capteur à entrefer variable

Cours technologie des systèmes II LACA09
5
L'inductance devant être sensible à la variation d'entrefer, il faut choisir >>
, alors
l'expression de cette même inductance devient :
Un déplacement Δx de l'armature entrainant une variation de l'entrefer,
l'inductance prend une nouvelle valeur :
Soit :
et
Si on a pratiquement :
Et la sensibilité capteur peut s'écrire :
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%