composants de puissance - Département Génie électrique

COMPOSANTS DE PUISSANCE
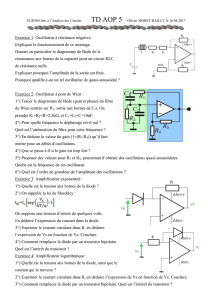
1-DIODE
La substance active, le silicium, qui constitue la diode de puissance à semi-
conducteurs est une substance semi-conductrice c'est-à-dire une substance à
résistance décroissante lorsque la température croît; elle est classée entre les
isolants et les conducteurs.
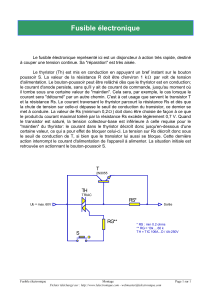
La diode, constituée par une seule jonction PN, est l’élément unidirectionnel
plus simple. La figure précédante donne sa représentation symbolique et indique les
conventions de signe adoptées pour le courant et la tension,
1.1. Etat passant
Quand le circuit dans lequel est placée la diode tend à faire passer le courant
dans le sens direct ou perméable, c'est-à-dire de l'anode A vers la cathode K la
diode est conductrice ou passante:
- le courant i positif prend la valeur qui lui est imposée par le reste du circuit. Il
faut veiller à ce que la valeur moyenne Imoy de i ne dépasse pas le courant
moyen nominal de la diode;
- La tension v aux bornes a une valeur positive faible, de l'ordre du volt. En
première approximation, on peut négliger cette chute de tension directe
devant les autres tensions rencontrées dans le circuit.
Mhamed EL MRABET 1

1.2. Etat bloqué
Quand une tension négative aux bornes tend à faire passer le courant dans le
sens inverse ou imperméable, la diode est isolante ou bloquée:
- la tension négative ou tension inverse, imposée à la diode par le reste du
circuit, peut prendre une valeur élevée. Il faut veiller à ce qu’elle reste inférieure à la
tension inverse nominale de la diode;
- Le courant négatif, ou courant inverse, est très faible, de l'ordre de quelques
dizaines de milliampères. En première approximation, on peut le négliger.
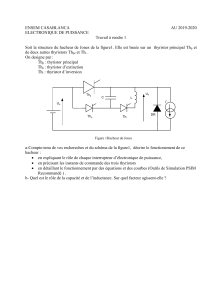
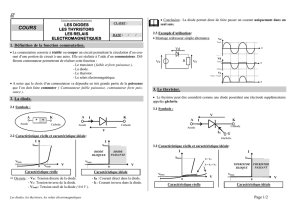
1.3. Caractéristique statique - Simplification
Dans l'étude des redresseurs, on peut, du moins dans un premier temps,
supposer les diodes parfaites (figure ci-après), c'est-à-dire négliger la chute de
tension directe et le courant inverse,
Ensuite, si c'est nécessaire, on corrige les résultats obtenus pour tenir compte
notamment de la chute de tension directe et des pertes correspondantes,
Mhamed EL MRABET 2

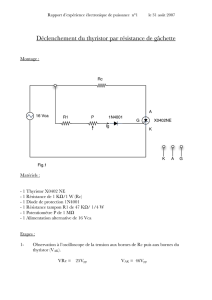
1- 4 caractéristique de la diode réelle
Mhamed EL MRABET 3

2 THYRISTOR
Un thyristor est un semi-conducteur à quatre couches PNPN assimilable à trois
jonctions ; il constitue un interrupteur unidirectionnel à fermeture commandée. En
plus de l’anode et la cathode, il est muni d’une électrode de déblocage, appelé
gâchette.
Un thyristor 2000 V, 300 A est typiquement une tranche de silicium de diamètre
de 30 mm et d'épaisseur de 0,7 mm.
2.1. Modes de fonctionnement
Si la tension v à ses bornes est négative, le thyristor est bloqué; il n'est
parcouru que par un faible courant de fuite inverse.
Il faut veiller à ne pas dépasser la tension inverse maximale.
Si de négative la tension v devient positive, le thyristor reste bloqué; il n'est
traversé que par un faible courant de fuite direct.
Il faut veiller à ne pas dépasser la tension directe blocable à courant de gâchette nul.
Pour les thyristors normaux, elle est toujours voisine de la tension inverse maximale.
Si la tension v étant positive, on fait passer entre la gâchette et la cathode une
impulsion positive de courant, le thyristor devient passant.
La durée de d'impulsion de déblocage doit être suffisante pour que le courant i
puisse atteindre une valeur dite" courant d'accrochage".
Quand il est conducteur, le thyristor se comporte comme une diode, la chute de
tension directe est toutefois un peu plus forte.
Il ne se bloque que lorsque le courant direct s'annule; en réalité, lorsqu'il devient
Mhamed EL MRABET 4

inférieur à une valeur très faible appelée "courant de maintien" de la conduction.
Après l'amorçage, la gâchette a perdu son pouvoir de contrôle.
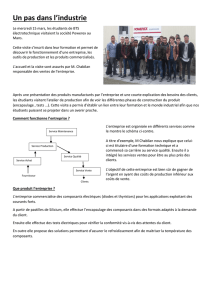
2.2. Caractéristique statique simplifiée
Lors de l'étude des redresseurs à thyristors, on utilise, du moins dans un
premier temps, la caractéristique schématisée idéalisé (voir figure ci après). Elle
comprend trois branches;
- OA : tension négative, thyristor bloqué,
- OB : tension positive, pas d'impulsion sur la gâchette depuis que ê' est devenu
positif, thyristor bloqué;
- OC : après envoi d'une impulsion alors que v était positif, thyristor conducteur.
Ce tracé néglige;
- Le courant de fuite inverse (i négatif très faible, pour la branche OA);
- Le courant de fuite direct (i positif très faible, pour la branche OB);
- La chute de tension directe (v positif de l'ordre de 2 volts, pour la branche OC).
Ces trois branches sont forcément décrites dans l'ordre indiqué par les flèches
sur la figure
2.3 Principales caractéristiques limites
Comme pour la diode, le comportement dynamique du thyristor lors de
l'amorçage et du blocage sera présenté ultérieurement. Cette étude expliquera la
longue liste des caractéristiques intervenant dans la spécification complète d'un
thyristor.
Lors de la mise en œuvre d'un thyristor dans un redresseur, après avoir veillé;
- à ce que le courant ne soit pas excessif (pointe de courant, valeur moyenne
ou, plus souvent, valeur efficace du courant);
Mhamed EL MRABET 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
1
/
107
100%