SERVOMOTEURS CRC, CRD, CRG COURANT ALTERNATIF

SERVOMOTEURS CRC, CRD, CRG
COURANT ALTERNATIF
NOTICE DE CABLAGE ET D’ENTRETIEN
Informations données à titre indicatif et sous réserve de modifications éventuelles
Réf.: IME 2120
Rev.: 0
Page : 1/1
Date : 02/05
GÉNÉRALITÉS
Attention : ces moteurs ont été testés en usine ; les
contacts de fin de course sont réglés pour une rotation de
90°. Il est inutile d’intervenir à l’intérieur du capot.
Les servomoteurs type CRC, CRD, CRG conviennent pour la
motorisation des vannes à tournant sphérique et conique et
des vannes à papillon, nécessitant une rotation de 90° et
possédant une platine de motorisation ISO. L'appareil dispose
de contacts auxiliaires secs de signalisation, d'une indication
visuelle de position, d'une commande manuelle de secours
avec débrayage, d'un raccordement électrique par embases et
fiches suivant la norme 43650 A.
Tensions d’alimentation : 24V ca & 240V ca
Classe de protection : IP 65
Facteur de service
Service % temps % couple
intermittent 30 100
continu 100 50
VÉRIFICATION À RÉCEPTION
Vérifier qu’il n’y a pas eu de dommages au cours du
transport.
Vérifier que les caractéristiques du servomoteur livré
correspondent au bon de livraison et à la commande
(notamment la tension électrique).
En cas de stockage, le servomoteur doit être placé dans un
endroit sec à l’abri des intempéries.
Si le servomoteur a été monté sur le robinet en usine, les
opérations de réglage ont été effectuées par le monteur.
Vérifier le montage en débrayant le moteur à l’aide du bouton
de débrayage et en manœuvrant la vanne à l’aide de la
commande de secours.
MONTAGE SUR LA VANNE
Le raccordement se fait par platine selon norme ISO 5211.
Respecter le sens de fermeture de la vanne dans le sens
horaire. Par exemple : vanne fermée égale position de l’index
du servomoteur fermé.
type CRC CRD CRG
platine F05 F05 F07
carré 14 14 17
CONNEXIONS ÉLECTRIQUES TYPE CRC, CRD,
CRG
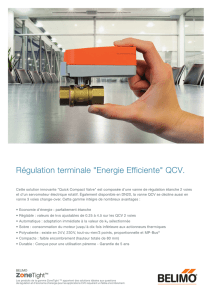
1/ Circuit commande et puissance.
> connecteur DIN
avec embase
repérée ROUGE
> tensions alternatives
(24V ca et 240V ca)
Dévisser la vis du connecteur, retirer celui-ci de sa base et
enlever la vis et le joint d’étanchéité.
A l’aide d’un petit tournevis, enlever la partie amovible du
connecteur. Passer le câble d’alimentation dans le presse-
étoupe du connecteur.
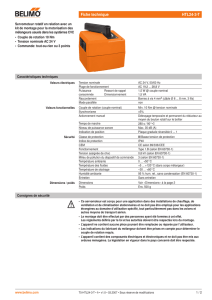
En 1, raccorder le neutre ;
En 2, raccorder la phase de commande, sens ouverture
En 3, raccorder la phase de commande, sens fermeture
Raccorder la terre sur la borne terre.
Commande :
L’inversion du sens de rotation s’obtient par l’emploi d’un
dispositif de type inverseur.
La fermeture (sens horaire) se réalise en alimentant la borne
3 ; l’ouverture en alimentant la borne 2 ; la borne 1 étant
raccordée au neutre.
L'inversion de sens peut être effectuée à l'aide de tous types
d'appareils de commande (bouton inverseur, pressostat,
thermostat, automate, etc.) suivant le schéma de principe
représenté ci-dessus.
Remarque : si, en cours de manœuvre, l'inverseur est basculé
en position "0" (aucune connexion) le servomoteur s'arrête, il
peut ensuite être commandé dans n'importe quel sens.
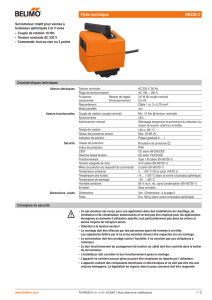
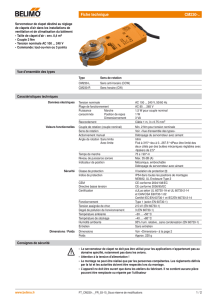
(2) capot
(
1
)
ca
r
te
r
(5) Indicateur de
p
osition / cde manuelle
(3) connecteurs
(4) débrayage

SERVOMOTEURS CRC, CRD, CRG COURANT ALTERNATIF
Informations données à titre indicatif et sous réserve de modifications éventuelles
Réf.: IME 2120
Rev.: 2
Page : 2/2
Date : 02/05
2/ circuit contacts auxiliaires secs
> connecteur DIN
avec embase
repérée BLANC.
Démonter le connecteur comme décrit plus haut.
En 1, raccorder le commun du circuit de signalisation ;
En 2, raccorder le fil correspondant au sens ouverture ;
En 3, raccorder le fil correspondant au sens fermeture ;
Procéder au remontage sur l’embase repéré BLANC comme
décrit ci-dessus.
Des micro contacts secs intégrés dans le servomoteur sont
actionnés sur les positions d'ouverture et de fermeture.
Signal d'ouverture entre les bornes 1 et 2.
Signal de fermeture entre les bornes 1 et 3.
MONTAGE DE PLUSIEURS MOTEURS EN
PARALLÈLE
Attention : ne pas brancher plusieurs moteurs sur un même
inverseur ; utiliser un relais inverseur par moteur.
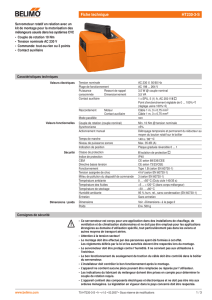
RÉGLAGE DES FINS DE COURSE
Si le servomoteur a été monté sur la vanne par nos soins,
il est livré déjà réglé.
Dans le cas contraire, démonter le capot repère d en
dévissant les 4 vis.
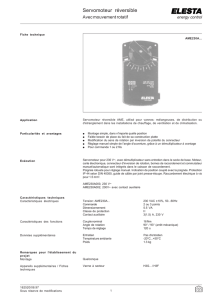
A l’aide d’un tournevis, faire pivoter les cames repère k
(maintien par friction). En partant du haut :
9.2 came de fin de course moteur : ouverture
9.1 came de fin de course moteur : fermeture
9.4 contact auxiliaire ouverture (à régler légèrement en
avance sur la première came d’ouverture)
9.3 contact auxiliaire fermeture (à régler légèrement
en avance sur la première came de fermeture)
! Pour le CRC les cames auxiliaires sont en bas (9.1 et 9.2) et
les principales en haut (9.3 et 9.4) !
Lors du remontage, il est impératif de s'assurer que
l'indicateur de position est aligné avec le repère gravé sur
l'extrémité de l'arbre de manœuvre.
COMMANDE DE SECOURS
Le servomoteur peut être débrayé et ré-embrayé sous
tension. Ne jamais laisser le moteur débrayé sous tension
plus de cinq minutes. Quand cela est nécessaire, couper
l’alimentation électrique.
Passer le bouton de débrayage repère f sur la position
«MAN». Oter le bouchon indicateur de direction, puis, à l’aide
d’une clef de 9 (CRC) ou 17 (CRD, CRG), manœuvrer la
commande manuelle repère g se trouvant sur le capot.
Ré-embrayer en passant le bouton repère f sur la position
«AUTO». Remettre le bouchon en alignement avec le
repérage sur l’extrémité de l’arbre de commande.
PROTECTION CONTRE L’HUMIDITÉ
Afin d’éviter la condensation à l’intérieur du capot, le
servomoteur peut être équipé en option d’un maintien en
température par résistance de chauffage. Cette résistance est
alors connectée à l'alimentation principale et ne nécessite pas
de branchement supplémentaire.
POTENTIOMÈTRE DE RECOPIE
Sur les modèles CRD et CRG, il existe une option
potentiomètre de recopie. Sa résistance standard est de
2,5KΩ. Le branchement s’effectue sur la carte électronique en
(10).
PIÈCES DÉTACHÉES
Code Désignation Quantité
068934 Indicateur de position 1
126031 Capot 1
064620 Vis capot 1
N45320 Circuit imprimé + moteur 1
(9.3)
(9.2)
(10)
(9.4)
(9.1)
1
/
2
100%