Hacheur

LES HACHEURS
Presser la touche F5 pour faire apparaître les signets
qui favorisent la navigation dans le document.
Sommaire
1 Généralités ............................................................................................................................... 1
2 Hacheur série ........................................................................................................................... 1
2.1 Etude de la structure de principe....................................................................................... 1
2.1.1 Allure des tensions et des courants............................................................................ 1
2.1.2 Calcul des grandeurs caractéristiques........................................................................ 1
2.2 Applications ...................................................................................................................... 2
3 Hacheur parallèle ..................................................................................................................... 3
3.1 Etude de la structure de principe....................................................................................... 3
3.1.1 Allure des tensions et des courants............................................................................ 3
3.1.2 Calcul des grandeurs caractéristiques........................................................................ 4
3.2 Applications ...................................................................................................................... 5
4 Hacheur à accumulation........................................................................................................... 5
4.1 Etude de la structure de principe....................................................................................... 5
4.1.1 Allure des tensions et des courants............................................................................ 5
4.1.2 Calcul des grandeurs caractéristiques........................................................................ 6
4.2 Applications ...................................................................................................................... 6
4.2.1 Généralités ................................................................................................................. 6
4.2.2 Etude sommaire du montage Flyback........................................................................ 7
4.2.3 Etude sommaire du montage Forward....................................................................... 9
5 Hacheurs réversibles .............................................................................................................. 10
5.1 Généralités ...................................................................................................................... 10
5.2 Hacheur en pont .............................................................................................................. 10
5.3 Autres types de hacheurs réversibles.............................................................................. 12
5.3.1 Hacheur en demi-pont.............................................................................................. 12
5.3.2 Hacheurs réversibles deux quadrants....................................................................... 12

HA 1
LES HACHEURS
1 Généralités
On distingue trois types de convertisseurs continu-continu: le hacheur série, le hacheur
parallèle et le hacheur à accumulation. Ceux-ci étant a priori unidirectionnels, on peut les
combiner pour obtenir des systèmes partiellement ou totalement réversibles, l'ensemble le plus
complet étant constitué par le hacheur en pont.
Les problèmes posés par l'utilisation des systèmes réels étant sensiblement les mêmes que
pour les montages redresseurs, nous nous limiterons à une étude simplifiée, en considérant les
éléments utilisés comme parfaits. Par contre, les applications étant souvent spécifiques d'un
type de hacheur, nous les traiterons directement après l'étude théorique correspondante.
2 Hacheur série
2.1 Etude de la structure de principe
2.1.1 Allure des tensions et des courants
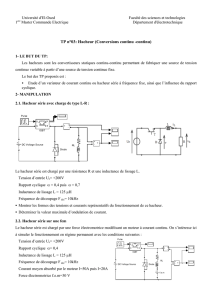
L'interrupteur est commandé périodiquement à la fermeture
et à l'ouverture. On pose T la période de répétition des signaux
de commande et α le rapport cyclique ( H est donc passant
pendant une durée égale à αT ).
Les allures des différentes grandeurs ( figure 2 ) s'obtiennent
en remarquant que le déblocage de H entraîne le blocage de D
par inversion de tension et que le blocage de H s'accompagne
de la mise en conduction de D pour permettre la circulation d'un courant ininterrompu dans la
charge ( effet de roue libre analogue à celui observé dans certains montages redresseurs ). On
en déduit en particulier que l'interrupteur H ne peut fonctionner qu'en auto-commutation
puisque, ni la tension à ses bornes, ni le courant qui le traverse, ne peuvent s'inverser. Par
contre, D fonctionne en commutation naturelle ( ici, par inversion de tension ).
2.1.2 Calcul des grandeurs caractéristiques
2.1.2.1 Valeur moyenne de u
UTudt TEdt TET
C
TT
== =
∫∫
11 1
00
α
α soit UE
C=α
i
D
IC
i
H
i
1 vH
vD u E
H
D
fi
gure 1

HA 2
2.1.2.2 Valeurs moyennes et efficaces des courants
courant dans l'interrupteur
valeur moyenne: ITIdt TIT
HC C
T
C
==
∫
11
0
αα soit II
HC C
=α
valeur efficace: ITIdt TIT
HC
T
C
22
0
2
11
==
∫αα soit II
HC
=α
Le courant i1 étant égal à iH, ces valeurs sont également les grandeurs caractéristiques du
courant fourni par la source d'alimentation.
courant dans la diode
valeur moyenne: ITIdt TIT T)
DC C
T
T
C
==−
∫
11
αα( soit II
DC C
=−()1α
valeur efficace: ITIdt TIT T)
DC
T
T
C
222
11
==−
∫αα( soit II
DC
=−1α
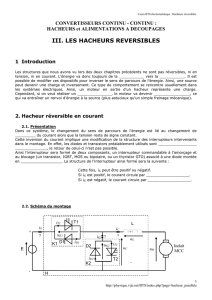
Remarques:
− Comme α peut normalement prendre toutes les
valeurs comprises entre 0 et 1, le cas le plus défa-
vorable correspond à α = 1 pour l'interrupteur et à
α = 0 pour la diode. Dans les deux cas, le courant
correspondant est en permanence égal à celui cir-
culant dans la charge. H et D pourront donc être
simplement dimensionnés comme s'ils devaient
débiter un courant continu égal à IC.
− La valeur moyenne de i1 ( donc de iH ) peut s'obte-
nir également en raisonnant comme suit:
Le rendement théorique étant égal à 1, la puissan-
ce fournie par E est égale à celle dissipée dans la
charge, soit 11
1
00
TEi dt TuI dt
T
C
T
∫∫
=. On en déduit
ETidt I Tudt
T
C
T
11
1
00
∫∫
=, d'où EI1C = ICUC = ICαE,
soit, finalement, I1C ( = IHC ) = αIC.
− La valeur moyenne de la tension de sortie étant
toujours inférieure à E, ce hacheur est aussi quali-
fié d'abaisseur.
2.2 Applications
Les plus importantes se situent dans le domaine de la variation de vitesse pour machines à
T + αT
TαT
D H D H
−E
i
D
vD
IC
E
vH
IC
i
1 =
i
H
E
u
t
t
t
t
t
fi
gure 2

HA 3
courant continu. En dehors de cela, on peut réaliser des alimentations de tension variable en
associant un hacheur série, un circuit de filtrage et un dispositif de régulation de la tension de
sortie agissant sur le rapport cyclique. Ce procédé est cependant peu employé et de toute façon
réservé aux puissances relativement importantes. Aux faibles et moyennes puissances, on uti-
lise généralement les alimentations à découpage, sur lesquelles nous reviendrons dans le cadre
de l'étude du hacheur à accumulation.
3 Hacheur parallèle
3.1 Etude de la structure de principe
3.1.1 Allure des tensions et des courants
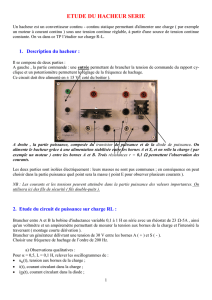
Nous ferons ici une double hypothèse simplificatrice. D'une
part, nous supposerons que le courant dans L est strictement
constant ( hypothèse habituelle ). D'autre part, nous admettrons
que la tension de sortie est également strictement constante ( ce
que l'on peut par exemple obtenir en plaçant un condensateur de
forte valeur entre les bornes de sortie ).
Pour obtenir les courbes de la figure 4, on en-
visage successivement les deux états possibles de
l'interrupteur H.
a) H passant
Dans ce cas, vH = 0 et vD = −VC, ce qui maintient
D bloquée par inversion de tension. Par ailleurs,
on a uL = E et iH = I1C.
b) H bloqué
D conduit par effet de roue libre. Il s'ensuit que
iD = i = I1C, vH = VC et uL = E − VC.
L'étude de ces courbes montre en particulier
que le courant de sortie est interrompu ( la charge
ne pourrait donc pas être à prédominance inducti-
ve ). D'autre part, la valeur moyenne de uL devant
obligatoirement être nulle, ceci oblige VC à être
supérieur à E. C'est pourquoi ce montage est aussi
appelé hacheur élévateur. On peut remarquer qu'il
permet en particulier à une source de f.é.m. don-
née de débiter dans un récepteur de f.c.é.m. plus
élevée.
T + αT
T
T
α T
α
T
DH D H
E−VC
E
vD
uL
−VC
I1C
i
D
VC
vH
I1C
i
H
t
t
t
t
t
fi
gure 4
i
i
D I1C uL vD
V
E
i
H
v
H
L
H
D
fi
gure 3

HA 4
3.1.2 Calcul des grandeurs caractéristiques
3.1.2.1 Valeur moyenne de la tension de sortie
Celle-ci étant strictement constante, sa valeur moyenne est aussi égale à sa valeur instanta-
née VC. Il suffit donc de déterminer la relation liant VC à E. Pour l'obtenir, on peut utiliser le
fait que la valeur moyenne de uL est nulle. Ceci entraîne que
11 0
0
TEdt TEVdt
T
C
T
Tα
α
∫∫
+−=()
On en déduit 11 0
TET TEV T T)
C
αα+− −=( )( , soit Eα + E(1-α) − VC(1-α) = 0, d'où finalement
VE
C=−1α
On retrouve ici le fait que VC est systématiquement supérieur à E. D'autre part, lorsque α
tend vers 1, VC tend théoriquement vers l'infini. Dans la pratique, ceci n'est évidemment pas
possible car, comme cette tension se retrouve aux bornes des éléments bloqués, il y aurait
claquage des semi-conducteurs au-delà d'une certaine valeur de α. Dans ce type de montage,
comme pour le hacheur à accumulation que nous étudierons au paragraphe suivant, le rapport
cyclique devra donc toujours être limité à une valeur telle que l'on ne dépasse pas les tensions
maximales admissibles par chaque semi-conducteur.
3.1.2.2 Valeurs moyennes et efficaces des courants
Comme d'habitude, nous exprimerons ces grandeurs en fonction de la valeur moyenne IC du
courant dans la charge. Les allures étant tracées par rapport au courant circulant dans L, on
calcule dans un premier temps toutes les grandeurs en fonction de I1C. Il suffit ensuite de rem-
placer I1C par son expression en fonction de IC pour obtenir les expressions définitives.
Les allures des courants étant analogues à celles obtenues pour le hacheur série, on obtient
immédiatement: III III III I
HC CH CDCC CD C
== ==− ==−αα α α
11 1 1
11()
d'où on tire
II
IIII
II III
C
C
HC C H C
DC C D
C
11
11
1
=−
=−=−
===
−
α
α
α
α
α
α
On déduit en particulier des relations précédentes que, pour un courant IC donné, le courant
à fournir par la source et ceux circulant dans les semi-conducteurs sont d'autant plus élevés
que α est plus proche de l'unité. Ceci fait apparaître une deuxième limitation sur le rapport
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%