Coder pour Atmel ATtiny

Ceci est un extrait électronique d'une publication de
Diamond Editions :
http://www.ed-diamond.com
Ce fichier ne peut être distribué que sur le CDROM offert
accompagnant le numéro 100 de GNU/Linux Magazine France.
La reproduction totale ou partielle des articles publiés dans Linux
Magazine France et présents sur ce CDROM est interdite sans accord
écrit de la société Diamond Editions.
Retrouvez sur le site tous les anciens numéros en vente par
correspondance ainsi que les tarifs d'abonnement.
Pour vous tenir au courant de l'actualité du magazine, visitez :
http://www.gnulinuxmag.com
Ainsi que :
http://www.linux-pratique.com
et
http://www.miscmag.com

HACKS/CODES MICROCONTRÔLEURS
Coder pour Atmel ATtiny
Denis Bodor
EN DEUX MOTS
Dans un précédent hors-série (23),
nous avons découvert la famille de microcontrôleurs
Atmel AVR avec GCC et l’ATmega16. Nous allons
aujourd’hui descendre dans la gamme et toucher
l’ATtiny via un développement en assembleur
AVR.
90
GNU LINUX MAGAZINE FRANCE
91
1. Ode à l’AVR
our les lecteurs ayant raté le hors-
série 23, voici un petit résumé
de ce qu’est un microcontrôleur
AVR. Un microcontrôleur est
un processeur couplé à de la mémoire
(Flash de préférence) et à un ensemble de
fonctionnalités intégrées (convertisseurs,
timers, sources d’interruption interne et
externes, etc.).
Pour utiliser le microcontrôleur, il suft de
créer un code et de le télécharger dans le
composant. Dès la mise sous tension (ou
après un reset), le microcontrôleur exécute
le code embarqué.
Il existe des centaines de microcontrôleurs
produits par différents fabricants parmi
lesquels Microchip, SGS Thomson, Intel ou
encore Atmel. Ce dernier propose une vaste
gamme appelée AVR qui est directement
concurrente de la gamme proposée par
Microchip sous le nom de PIC. AVR et PIC
sont souvent mis dans le même panier, car ils
font l’objet d’une attention toute particulière
de la presse et des sites spécialisés en
électronique.
En effet, AVR comme PIC disposent d’une
large logithèque, sont peu onéreux et
relativement faciles à programmer, par rapport,
par exemple, aux dérivés de 68HC11/12.
La popularité des deux gammes, PIC et
AVR, permet à l’utilisateur GNU/Linux
de disposer d’un certain nombre d’outils
de développement, contrairement aux
autres microcontrôleurs du marché, pour
lesquels il n’existe souvent que des solutions
Windows.
Les différents modèles d’une gamme
se distinguent en fonction de plusieurs
caractéristiques :
La taille de mémoire Flash utilisable allant
du simple ko à 256 ko. Il faut préciser ici que cette valeur
est relative, car certains microcontrôleurs se programment
en mots de 16 bits et d’autres de 12 bits. Le nombre
d’instructions téléchargeables dans la mémoire est donc
variable selon le modèle et le fabricant.
Le nombre d’entrées/sorties, de 3 à près d’une centaine.
La puissance en fréquence d’horloge ou en MIPS.
Le nombre de convertisseurs analogique/digital.
Le nombre de registres de travail et/ou le volume de
mémoire vive (RAM).
Les fonctionnalités courantes (timer, watchdog, PWM,
etc.).
Les fonctionnalités spéciques (USB, USB On-The-Go
(OTG), wireless, i2c, etc.).
Le format (PDIP, SOIC, TQFP, PLCC, etc.).
Le prix.
C’est un avis tout personnel, mais l’AVR semble se distinguer
très clairement des PIC et autres concurrents :
Une partie de la gamme AVR accepte du code développé
avec GCC (ATmega par exemple) en raison de l’important
volume de mémoire Flash. Comme l’article du hors-série
le présentait, il est parfaitement possible d’écrire du code
C efcace pour un microcontrôleur AVR et proter d’une
bibliothèque C spécialisée. Les petits modèles d’AVR se
programmeront en assembleur. C’est l’objet du présent
article.
La programmation du microcontrôleur AVR est dite
« ICSP » ou « in situ ». Le microcontrôleur est connecté
classiquement, comme pour sa mise en œuvre dénitive et on
greffe une connectique spécique pour le programmer sans
avoir recours à un montage spécial (un programmeur). La
liaison AVR/PC se fera généralement via un port parallèle (il
existe également des adaptateurs série). Les PIC nécessitent
souvent un programmeur comme le montage JDM (voir
GLMF 73, juin 2005) via un port série RS232 en voie de
disparition sur les congurations actuelles et posant un
certain nombre de problèmes d’alimentation. Dans les
deux cas, AVR comme PIC, les logiciels permettant le
chargement du code dans la mémoire du microcontrôleur
existent sous GNU/Linux.
L’assembleur utilisé pour les AVR est plus abordable pour
le débutant. Certes, ce langage reste ce qu’il est, mais
les PIC ajoutent à la complexité en travaillant avec deux
banques (16F628 par exemple) avec lesquelles il faut jongler.
Le jeu d’instructions de l’AVR est plus riche et, même si
cela ne semble pas être un élément important pour les
spécialistes, on dispose d’une plus grande liberté dans le
développement.
Arrêtons là le comparatif qui reste nalement très subjectif.
PIC et AVR, autrement dit, Microchip et Atmel, sont en guerre
sur ce secteur de marché et cela ne date pas d’hier. En 1997,

Numéro 84 / Juin 2006
90
GNU LINUX MAGAZINE FRANCE
91
Venons-en aux caractéristiques de l’ATtiny15L
dont le seul point faible, à mon goût, est
le manque d’entrées/sorties, ce qui est
normal vue sa taille. Ceci est toutefois
largement compensé par la richesse des
fonctionnalités :
1 ko de mémoire Flash. Voilà qui est
largement sufsant pour les applications
envisageables avec ce type de composant.
Notez que la prochaine génération d’ATtiny
disposera de bien plus de mémoire Flash
pour un format (PDIP 8) identique.
Oscillateur interne de 1.6 Mhz. Il y
a quelques années, il était nécessaire
d’utiliser un quartz ou un circuit RC en
guise d’horloge pour le microcontrôleur.
L’ATtiny15L comme bien d’autres est
en mesure de se passer de ce type de
chose en utilisant son propre oscillateur
interne calibré. Plus simplement, cela
signie l’économie de deux broches sur
le composant et une mise en œuvre bien
plus simple.
32 registres de 8 bits. Il s’agit, grossièrement,
de la mémoire vive du système ou, si vous
voulez, de vos variables.
64 octets d’EEPROM. Contrairement
aux registres qui sont dans un état
indéterminé après la mise sous tension,
l’EEPROM conserve les données stockées
lorsque le composant n’est plus sous
tension. Nous avons donc la mémoire
Flash pour le programme et les données
statiques, les registres pour les variables
et l’EEPROM pour le stockage. Une partie
de la conguration du microcontrôleur est
également stockée dans l’EEPROM.
6 entrées/sorties utilisables selon
conguration. Il faut pondérer cette
caractéristique, car sur les 6 E/S disponibles,
une est utilisée, par défaut, par le reset
externe. Il est possible de « récupérer »
cette sortie, mais la programmation ICSP
basse tension n’est alors plus possible.
Sur les 5 E/S restantes, il faut également
prendre en considération les multiples
fonctions de chaque broche. Ainsi, par
exemple, la broche 7, nommée PB2, est
une E/S binaire, mais peut également être
congurée comme source d’interruption
externe ou entrée analogique. Notez
également que 4 des 6 E/S sont utilisées
pour la programmation ICSP. C’est à ce
prix qu’il est possible de « bourrer » tant
de fonctionnalités dans un composant
de 8 broches.
2 timers. Un timer peut être vu comme
une tâche de fond (attention, c’est une
Microchip réglait déjà des comptes avec Atmel via un document
intitulé « La vérité sur l’AVR » (« The Truth About AVR »)
comparant leur produit avec ceux du concurrent.
Le document est encore intéressant et amusant à lire aujourd’hui
même si les griefs contre l’AT90S2313 et AT90S1200 ne
sont plus d’actualité. Il est des domaines où la concurrence
semble bien plus violente que dans le monde des systèmes
d’exploitation pour PC et Mac.
2. ATtiny15L
L’ATtiny15L est au cœur du présent article. Pour le décrire,
commençons par l’aspect le plus bassement matérialiste : le
prix. Un ATtiny15L, acheté auprès d’un détaillant électronique
(GoTronic, Selectronic, Conrad, etc.), vous coûtera un peu
plus de 3 euros. En prenant en compte les composants
nécessaires à la fabrication de l’adaptateur ICSP et quelques
composants de base pour l’expérimentation (résistances,
LED, condensateurs, etc.), vous pouvez compter un budget
entre 15 et 30 euros pour des heures de plaisir.
Notez également que des kits de développement et des
programmeurs Atmel existent sous les désignations STK200,
STK300 ou STK500. Ces kits sont compatibles avec l’application
de programmation pour GNU/Linux décrite ci-après. Si le
prix d’un achat neuf calme vos ardeurs (environs 150 euros)
peut-être aurez-vous la chance d’en trouver d’occasion
sur les sites d’enchères en ligne. Néanmoins, la solution
consistant à fabriquer son propre adaptateur ICSP est bien
plus économique (quelques euros).
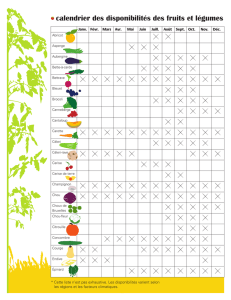
Fig. 1 : Schémas de connexion de l’adaptateur ICSP sur port
parallèle. Ce montage est sans doute le plus simple
qui soit, mais n’offre aucune protection.

simple illustration, un AVR n’est pas un
système multitâche). Une fois conguré
dans ce sens, un timer va déclencher
périodiquement une interruption. Une
interruption, comme son nom l’indique,
est un évènement qui va interrompre
le fonctionnement du programme. Le
programmeur aura pris soin de créer
un morceau de code spécique qui sera
alors exécuté. Ceci fait, le fonctionnement
normal du code reprendra. Notez au
passage que le microcontrôleur ne peut
pas ne rien faire. Tout comme avec une
application graphique, il faut une boucle
principale.
Un convertisseur analogique/digital (ADC)
multiplexé en 4 canaux. Le monde ne
se compose pas de 0 et de 1. Pour
que le microcontrôleur puisse travailler
avec des données analogiques, il faut
les convertir en valeurs numériques.
L’ATtiny15L intègre un convertisseur
10-bit utilisable de différentes manières
(relative ou absolue).
Une sortie PWM rapide (Pulse Width
Modulation ou modulation de largeur
d’impulsion) à 150 kHz. Nous y reviendrons
plus en détail dans un prochain article.
Différentes fonctionnalités intéressantes,
comme la mise en sommeil (sleep mode)
avec un réveil sur changement d’état
d’une des broches, le contrôle de la
qualité d’alimentation (Brown-out Detection
Circuit), le chien de garde (Watchdog)
programmable pour assurer la disponibilité
du système et le reset automatique en
cas de problème, etc.
3. Programmation
Au risque de me paraphraser (article dans
le HS23), voici de brèves explications sur la
méthode de programmation des composants
AVR et l’ICSP. Le schéma page 91 présente la
connexion et la composition de l’adaptateur
ICSP sur port parallèle d’un PC.
Comme vous pouvez le constater, il est très
simple, mais des adaptateurs plus complexes
reposant par exemple sur le driver de ligne
74HC244 sont documentés sur le Web et
sont également supportés par les logiciels
de programmation AVR existant sous GNU/
Linux.
L’adaptateur décrit ici présente l’avantage
de « tenir » dans un le cache plastique
d’un connecteur parallèle, mais n’offre pas
toutes les protections peut-être souhaitées
(inversion de connecteurs, court-circuit,
etc.).
Remarquez que les adaptateurs ICSP, quels qu’ils soient,
sont utilisables avec toute la gamme AVR 8-bit d’Atmel. Il
faudra simplement prendre garde à bien repérer les broches
MOSI (Master Out Slave In), MISO (Master In Slave Out), RST
(reset) et SCK (Serial ClocK) pour chaque microcontrôleur
de la gamme.
Côté logiciel, j’ai opté pour
uisp
, un programme d’Uros
Platise maintenu actuellement par Marek Michalkiewicz
(
http://www.nongnu.org/uisp/index.html
). Ce logiciel en ligne
de commande supporte bon nombre d’adaptateurs, dont
celui décrit dans cet article (sous la désignation
dapa
pour
« Direct AVR Parallel Access »).
La programmation, une fois l’adaptateur connecté à l’AVR, se
fera très simplement, en trois étapes. Tout d’abord, il convient
d’effacer la mémoire Flash du microcontrôleur :
On charge ensuite le programme :
Enn, l’étape qui n’est pas strictement nécessaire mais
fortement recommandée, la vérication :
Bien entendu, l’utilisateur doit avoir les permissions adéquates
(rw) sur l’entrée dans
/dev/parpot0
et le pilote
ppdev
doit
être chargé dans le noyau.
Le chier
prog.hex
contient, au format hex Intel, le code
issu de l’assemblage. Comme précisé en début d’article, les
petits AVR se programment en assembleur (bien qu’il existe
une technique permettant d’utiliser GCC pour ensuite
bidouiller le code généré). Trois assembleurs destinés aux
AVR se distinguent :
HACKS/CODES MICROCONTRÔLEURS Coder pour Atmel ATtiny
92
GNU LINUX MAGAZINE FRANCE
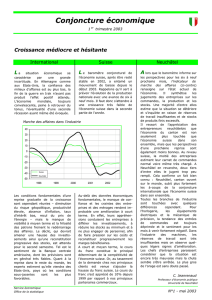
L’ATtiny15L en situation. Notez le l vert reliant le reset avec Vcc.
Dans sa conguration par défaut, la broche 1 (PB5) n’est pas
utilisable et doit être reliée au Vcc ou à un circuit avec un bouton
poussoir et une résistance de rappel au Vcc. En mettant la broche
1 à la masse, on fait alors un reset du microcontrôleur.
uisp -dlpt=/dev/parport0 --erase -dprog=dapa
uisp -dlpt=/dev/parport0 --upload if=prog.hex \
-dprog=dapa -dno-poll -v
uisp -dlpt=/dev/parport0 --verify if=prog.hex \
-dprog=dapa -dno-poll -v

Numéro 84 / Juin 2006
avr-as
: C’est l’assembleur GNU livré avec
avr-gcc
. Je
ne recommanderai pas cette solution sauf si vous avez
l’habitude de l’utiliser sur une autre plate-forme. La syntaxe
de l’assembleur n’est pas la même que la solution mise
à disposition par Atmel (AVR Studio) et l’adaptation de
code trouvé sur le Web sera difcile.
avra
: Voici l’une des solutions packagées dans Debian.
L’assembleur est mature, mais nécessitera l’utilisation
de chiers d’en-tête personnalisés ou repris du kit de
développement Atmel. Ceci n’est pas un point critique,
car ces chiers se limitent à décrire une correspondance
entre des adresses et des mots clefs qu’on trouvera dans
le datasheet (documentation) du composant.
gavrasm
: Un autre assembleur très performant et
également compatible avec la syntaxe de l’assembleur Atmel.
gavrasm
séduit par le fait qu’il apporte des informations
complémentaires lors de l’assemblage du code comme
celles qu’on a l’habitude de trouver avec un compilateur
C (avertissement des variables/registres dénis mais non
utilisés, etc.). On notera toutefois que
gavrasm
intègre « en
dur » les correspondances habituellement déclarées dans
les chiers d’en-tête. Ceci peut sembler très pratique, mais
souvent déroutant et surtout très inhabituel.
4. Et si on codait ?
L’assembleur donne souvent une double image à la fois
attirante et rebutante. Assembleur est souvent synonyme de
performances, mais également de complexité.
Ce n’est qu’en passant au-delà des préjugés qu’on se rend
nalement compte qu’il n’en est rien. Il vous faudra simplement
oublier vos habitudes de développeur C, Perl ou Python et les
avantages mis à disposition par ces langages de haut niveau.
Nous allons commencer par un classique du genre, j’ai nommé
l’équivalent du « hello world », la fameuse LED qui clignote :
Le chier
attiny15IO.asm
contiendra alors simplement
ceci :
HACKS/CODES MICROCONTRÔLEURS Coder pour Atmel ATtiny
93
Avant toutes choses, précisons différents
points :
L’assembleur n’est pas sensible à la casse.
Néanmoins, il est courant de laisser les
instructions en minuscule et les constantes
en majuscule.
Les directives débutant par un point sont
destinées à l’assembleur lui-même. Elles
permettent de préciser des éléments
importants pour l’assemblage comme,
par exemple, le microcontrôleur cible
(
.device
).
Les commentaires sont précédés d’un
point-virgule. L’assembleur ignorera tout
ce qui se trouve entre ce symbole et la
n de la ligne.
La simplicité de ce premier code n’a d’égal
que son mauvais fonctionnement dans
la pratique. Il est pourtant parfaitement
fonctionnel, nous y reviendrons. Les directives
.device
et
.include
parlent d’elles-mêmes.
.org
permet de préciser une adresse où
placer les instructions qui suivent. L’adresse
0x0000
de la Flash est le vecteur utilisé pour
un reset. En d’autres termes, c’est l’adresse
où se trouve le code à exécuter à la mise
sous tension du microcontrôleur.
Vous ne devez pas débuter votre code à
cette adresse. En effet, les adresses
0x0000
à
0x0008
incluse sont utilisées pour les
vecteurs d’interruption. Vous ne pouvez
placer ici qu’une seule instruction, un saut
relatif (
rjmp
) vers une adresse désignée par
une étiquette, ici
RESET:
. Notez l’utilisation
de
.org
juste avant.
Les étiquettes ne servent que de repère
dans le code, l’assembleur calculera le saut
à effectuer pour vous. Vous pouvez placer
des étiquettes où bon vous semble, si cela
vous amuse. Justement nous en arrivons
à
RESET:
.
C’est ici que notre programme commence.
L’instruction
sbi
pour Set Bit in I/O Register
permet d’activer un bit (à 1) dans un registre
d’E/S. Le registre utilisé est
DDRB
pour Data
Direction Register port B. Il permet, pour
chaque E/S de dénir si elle est utilisée
en entrée (0) ou en sortie (1).
DDRB
n’est
qu’une constante représentant le registre
à l’adresse
0x17
. La correspondance vient
directement de notre
attiny15IO.asm
où la
directive
.equ
donne l’équivalence.
Rappelons-le, ceci n’est utile que si vous
utilisez
avra
. Le bit activé est
PB4
pour l’E/S
4. C’est le bit 4 (cf.
attiny15IO.asm
).
La suite du code débute à l’étiquette
LOOP:
avec
sbi
que nous connaissons déjà mais
.device attiny15
; pour avra uniquement
.include «attiny15IO.asm»
.org 0x0000
rjmp RESET
.org 0x0009
RESET:
sbi DDRB,PB4
LOOP:
sbi PORTB,PB4
cbi PORTB,PB4
rjmp LOOP
.equ PORTB = 0x18
.equ DDRB = 0x17
.equ PB4 = 4
.equ PB3 = 3
.equ PB2 = 2
.equ PB1 = 1
.equ PB0 = 0
 6
7
6
7
1
/
7
100%