Article II. Bibliographie

!
1!
Article(I. De(la(prise(de(son(
1.1 Le microphone
Dʼaprès Thierry Le Van Suu: “Les microphones sont des dispositifs dont la
fonction est de mesurer des pressions acoustiques en convertissant lʼénergie
acoustique en une énergie de nature différente (généralement électrique ou
optique).”. Il sʼagit donc dʼun outil de mesure. [1]
Il existe différents types de microphones :
- Les microphones électrodynamiques (à bobine mobile)
- Les microphones électrodynamiques (à ruban)
- Les microphones électrostatiques (à condensateur)
- Les microphones électrostatiques (à électret)
- Les microphones magnétiques (utilisés dans les guitares et basses
électriques)
- Les microphones à charbon
Nous nʼaborderons pas ici les deux derniers types de microphones.
1.1.1 Microphones électrodynamiques à bobine mobile
1.1.1.1 Principe de fonctionnement
Le principe de fonctionnement du microphone électrodynamique à bobine
mobile est basé sur la loi de Faraday [2] :
€
ε
=
E .d
l
C
∫=−d
dt
B .d
S =
S
∫−dΘ
dt
Où
€
ε
est la force électromotrice induite,
€
dΘ
dt
est la variation du flux du champ
magnétique.
Autrement dit, la force électromotrice induite est égale à lʼopposée de la
variation du flux du champ magnétique à travers la surface limitée par le
circuit. Il y a donc génération dʼune tension variable aux bornes du circuit et
production dʼélectricité (conversion de lʼénergie mécanique en électricité).
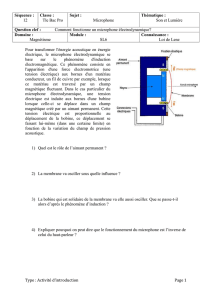
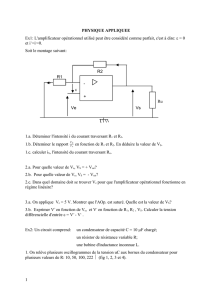
Pour le microphone, lʼonde acoustique qui est une onde énergétique va créer
un mouvement mécanique sur la membrane. Cette dernière va mettre en
mouvement une bobine mobile qui entoure un aimant. Il y aura alors une
variation du flux du champ magnétique capté par la bobine. La tension
variable aux bornes de la bobine créera un courant variable qui sera un signal
électrique. (FIG.1) [3]

!
2!
Ce signal sera ensuite amplifié par un préampli et converti en signal
numérique grâce à un convertisseur analogique - numérique.
FIG. 1 Schéma dʼun microphone électrostatique à bobine.
1.1.1.2 Caractéristiques [4][5]
Le microphone dynamique à bobine mobile est capable dʼencaisser une très
grosse pression acoustique.
Il sʼagit dʼun microphone assez robuste et ne nécessite pas dʼalimentation
externe pour fonctionner.
Il est cependant moins précis que le microphone électrostatique à
condensateur car la bobine est fixée à la membrane.
1.1.2 Le(microphone(électrodynamique(à(ruban([6](
1.1.2.1 Principe+de+fonctionnement+
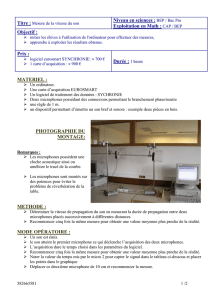
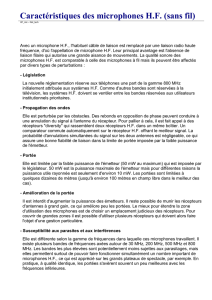
Le!microphone!électrodynamique!à!ruban!fonctionne!sur!un!procédé!similaire!à!
celui!du!microphone!électrodynamique!à!bobine.!!La!différence!réside!dans!les!
composants!:!à!la!place!d’une!bobine!mobile,!il!s’agira!d’un!ruban!en!aluminium,!
plissé!en!accordéon,!servant!à!la!fois!de!membrane!et!de!bobine.!(FIG.2)!
!

!
3!
!
FIG.2!Schéma!d’un!microphone!électrodynamique!à!ruban.!
!
1.1.2.2 Caractéristiques+
Les!microphones!électrodynamiques!à!ruban!possèdent!une!plus!large!bande!
passante!que!les!microphones!électrostatiques!à!bobines!et!sont!aussi!beaucoup!
plus!précis.!!Ils!sont!par!contre!plus!fragiles!et!possèdent!une!faible!tension!de!
sortie,!c’est!pourquoi!ils!nécessitent!une!bonne!amplification.!
1.1.3 Les microphones électrostatiques à condensateur
1.1.3.1 Principe de fonctionnement
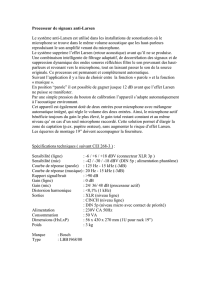
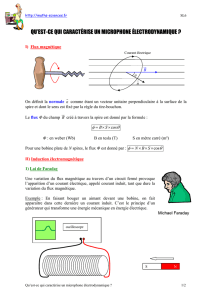
“Un microphone capacitif est assimilable à un condensateur dont la capacité
varie en fonction de la pression acoustique incidente.” [1] (FIG.3)
Il sʼagit ici dʼune capacité variable. Voyons cela plus en detail:
La capacité dʼun condensateur est donné par:
€
C=
ε
.A
d
Où
€
ε
est la permittivité du diélectrique, A est la surface de vis-à-vis des
armatures et d la distance entre les armatures du condensateur.
Dans notre cas,
€
ε
vaut
€
ε
0
qui est la permittivité du vide.
Dans le cas du microphone électrostatique à condensateur, une des deux
armatures du condensateur est fixe tandis que lʼautre est fixée à la
membrane. Lors des variations de la pression acoustique, la distance entre
les armatures du condensateur va varier, ce qui va entraîner une variation de
la tension aux bornes du circuit selon la loi [1][3]:
Q = CV
Où Q est la charge stockée dans le condensateur, C le coefficient capacitif du
condensateur et V la tension aux bornes du condensateurs.
Ces variations de la tension seront ensuite envoyées vers un préampli puis un
convertisseur.

!
4!
A la différence du microphone électrodynamique, il nʼy a quʼune variation de la
tension sans production dʼélectricité.
FIG. 3 Schéma dʼun microphone capacitif.
1.1.3.2 Caractéristiques [4][5]
Afin de fonctionner, le microphone électrostatique à condensateur a besoin
dʼune tension. Cette tension de 9V à 48V sʼappelle “Alimentation fantôme”.
Elle est fournie par le préampli via le câble du micro.
Ces microphones sont plus précis que les microphones dynamiques car la
membrane est lʼarmature mobile du condensateur. Ils sont aussi plus
sensibles au bruit et aux vibrations, ce qui fait quʼils nécessitent une
suspension. Ils sont aussi plus fragiles.
1.1.4 Microphones électrostatiques à électret
1.1.4.1 Principe de fonctionnement
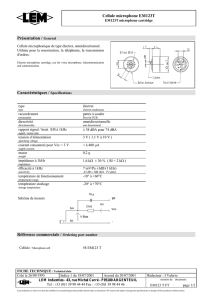
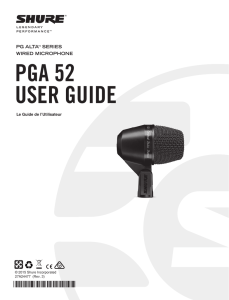
Le principe de fonctionnement est tout à fait similaire à celui du microphone
électrostatique à condensateur à la différence près quʼune des deux
armatures est polarisée de manière quasi permanente, lʼair est remplacé par
un polymère isolant et lʼalimentation fantôme par une pile.
FIG. 4 Schéma du microphone à électret.
1.1.4.2 Caractéristiques [7]
La sensibilité de ces micros ainsi que leur qualité est extrêmement variable.
Lʼalimentation nécessaire varie entre 9V et 12V. Leur plus grand avantage
est de pouvoir les miniaturiser énormément.

!
5!
1.2 Niveau(de(sortie([8](
Il!existe!différents!niveaux!de!sortie!mais!ceux!qui!nous!intéressent!sont:!!
K!Le!niveau!ligne!
K!Le!niveau!micro.!
Le!niveau!ligne!tourne!généralement!autour!de!l’ordre!du!Volt.!
Le!niveau!micro!varie!autour!de!quelques!millivolts.!
1.3 Directivité [5][7]
“Le terme directivité est employé pour décrire la réaction dʼun micro aux
sources sonores provenant de plusieurs directions.“ [5]
Il existe différents types de directivité :
K!Directivité!cardioïde!
K!Directivité!omnidirectionnelle!
K!Directivité!en!8!ou!bidirectionnelle!
K!Directivité!canon!
K!Directivité!hyperKcardioïde!
K!Directivité!hypoKcardioïde!
!
Nous!n’aborderons!pas!ici!les!trois!derniers!types.!
!
1.3.1 Directivité(cardioïde((
!
Ce!type!de!directivité!est!plus!favorable!aux!sons!arrivant!dans!l’axe!du!
microphone.!!(FIG.5!et!6)!Ces!derniers!sont!unidirectionnels,!sensibles!à!l’effet!de!
proximité!(amplification!des!basses!fréquences)!et!au!souffle.!
En!effet,!sur!le!diagramme!polaire,!il!est!possible!de!voir!différentes!courbes,!
fonctions!de!la!position!et!de!la!fréquence,!donnant!l’intensité!de!la!prise!en!
décibels.!
!
!
FIG.5!Directivité!cardioïde.!
!
 6
7
8
9
6
7
8
9
1
/
9
100%