Chapitre 8 : Introduction aux méthodes heuristiques

Graphes et RO – TELECOM Nancy 2A
Chapitre 8 : Introduction aux m´ethodes heuristiques
J.-F. Scheid
1

Plan du chapitre
I. Introduction
II. Quelques m´ethodes heuristiques
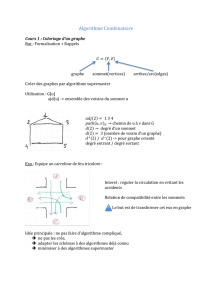
1Algorithme A∗
2Recuit Simul´e
3Algorithmes g´en´etiques
4Algorithme de colonies de fourmis
2

I. Introduction
Pour les probl`emes de grandes tailles :
pas de temps de calculs ”raisonnables” avec les m´ethodes exactes
recherche de ”bonnes” solutions approch´ees.
Heuristiques : r`egles empiriques simples qui ne sont pas bas´ees sur
l’analyse scientifique (6= algorithmes). Elles sont bas´ees sur l’exp´erience et
les r´esultats d´ej`a obtenus et sur l’analogie pour optimiser les recherches
suivantes. G´en´eralement, on n’obtient pas la solution optimale mais une
solution approch´ee.
M´eta-heuristiques : algorithmes d’optimisation (g´en´eralement de type
stochastique) combinant plusieurs approches heuristiques.
3

On a d´ej`a rencontr´e des m´ethodes heuristiques :
initialisation du ”branch-and-bound” pour le probl`eme du sac-`a-dos
(calcul de F)
m´ethode du coin Nord-Ouest pour l’affectation.
Ces exemples font partie d’une classe de m´ethodes appel´ees ”algorithmes
gloutons”.
Algorithme glouton (”greedy”) : construction d’une solution r´ealisable en
se ramenant `a une suite de d´ecisions qu’on prend `a chaque fois au mieux
en fonction d’un crit`ere local sans remettre en question les d´ecisions d´ej`a
prises. G´en´eralement, la solution obtenue est approch´ee.
Int´erˆet : algorithmes simples `a impl´ementer.
D´efaults : solutions approch´ees obtenues plus ou moins bonnes, crit`ere
local (”myopie”).
4

Exemple : Placement optimal de pi`eces 2D (Bin Packing).
On dispose de plaques rectangulaires toutes identiques dans lesquelles on
veut placer des pi`eces rectangulaires sans chevauchement. Les pi`eces `a
placer ont des dimensions diff´erentes.
plaque
pièces
. . .
On veut trouver le placement pour minimiser le nombre de plaques
utilis´ees.
Algorithme glouton :trier les pi`eces en fonction de leur taille et placer
d’abord les pi`eces les plus grandes.
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%