Dynamique

&
II. Dynamique
&
II.1
Table des matières
1. Force, accélération et inertie.................................................................................................2
1.1 Approche intuitive...........................................................................................................2
1.2 Lois de Newton ...............................................................................................................2
2. Types de forces......................................................................................................................3
2.1 Force électrique...............................................................................................................4
2.2 Force gravitationnelle......................................................................................................4
2.3 Forces de contact.............................................................................................................5
3. Technique de résolution........................................................................................................7
3.1 je fais un croquis du problème ........................................................................................7
3.2 je choisis un système d'axes de référence .......................................................................8
3.3 j'écris une équation de Newton selon chaque axe pour chaque objet .............................8
3.4 je résous le système d'équations algébriques ..................................................................9
4. Poids et poids effectif..........................................................................................................10
4.1 Poids et force gravitationnelle terrestre.........................................................................10
4.2 Que devient le poids d'un objet soumis à une accélération?.........................................11
5. Changement de référentiels.................................................................................................12
5.1 Référentiel d'inertie et lois de Newton..........................................................................12
5.2 Référentiel non-inertiel et force fictive d'inertie...........................................................13
6. Et pour voir si j'ai compris..................................................................................................15
6.1 ... la force de frottement ................................................................................................15
6.2 ... le poids effectif..........................................................................................................15
Stéphane Swillens - édition 2009

&
II. Dynamique
&
II.2
1. Force, accélération et inertie
Dans le chapitre de cinématique, j'ai pu constater que l'accélération, par définition, décrit la
modification de la vitesse du mobile, mais la question de savoir quelle peut bien en être la
cause n'a pas été abordée. C'est Newton qui va me donner la réponse.
1.1 Approche intuitive
Je rentre au Super Marché avec un caddie. Il est vide, tout neuf, les roues bien huilées et le
carrelage du magasin est tout lisse, bien horizontal. Je laisse un moment le caddie devant un
rayon, le temps de prendre un pain: le caddie ne bouge pas! Je pousse légèrement le caddie
vers l'avant: il se met en mouvement vers l'avant, facilement! Je le lache: il continue en avant!
Je le rattrappe et le retiens à peine: il s'arrête aussitôt... au rayon boissons! Je le charge de
deux bacs de bière et de 12 grandes bouteilles d'eau. J'ai tout ce qu'il me faut et veux me
diriger vers les caisses. A nouveau, je pousse légèrement le caddie chargé, mais je dois bien
constater que cette fois, il se met difficilement en mouvement. Je dois vraiment pousser bien
fort pour que le caddie atteigne une allure raisonnable. Mais à nouveau, si je le lâche à ce
moment, il va continuer sur sa lancée. Pour l'arrêter, je dois le retenir vigoureusement, et je
suis entraîné par lui le temps qu'il s'immobilise.
Je remarque donc que:
- (i) si je ne touche pas le caddie, celui-ci reste en place s'il était immobile, ou continue sur sa
lancée s'il était en mouvement, qu'il soit peu ou fort chargé.
- (ii) si je veux modifier l'allure du caddie, je dois directement agir sur lui (le pousser pour
qu'il aille plus vite, le retenir pour qu'il aille moins vite), et c'est d'autant plus difficile qu'il est
fort chargé.
- (iii) si je retiens le caddie pour l'arrêter, le caddie m'entraîne avec lui jusqu'à l'arrêt.
1.2 Lois de Newton
Agir sur le caddie, c'est en fait exercer sur lui une force d'une certaine grandeur dans un
certain sens le long d'une certaine direction. Je vois en passant que la force possède donc les
caractéristiques d'un vecteur (voir paragraphe 2.1.1 du chapitre I).
Stéphane Swillens - édition 2009

&
II. Dynamique
&
II.3
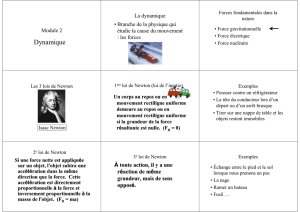
Reprenons les trois observations ci-dessus:
- (i) si je n'agis pas sur le caddie, si je n'exerce donc aucune force sur lui, il conserve sa
vitesse (éventuellement nulle), ou autrement dit, son accélération est nulle: c'est la condition
pour que le mobile soit à l'équilibre de translation. C'est aussi la première loi de Newton ou
loi d'inertie.
&
force nulle ⇒ accélération nulle ⇒ vitesse constante : il y a équilibre de translation.
&
- (ii) si j'exerce une force sur le caddie, sa vitesse est modifiée, car la force produit une
accélération qui a même direction et même sens que la force. Mais l'inertie du mobile
s'oppose à cette modification de vitesse: si j'augmente la charge du caddie, son inertie sera
d'autant plus grande et, pour une même force appliquée, l'accélération sera donc plus faible.
La deuxième loi de Newton ou loi fondamentale de la dynamique nous confirme cela:
l'accélération (c'est-à-dire l'effet) est proportionnelle à la force (c'est-à-dire la cause) et
inversement proportionnelle à la masse d'inertie. Et comme je pourrais bien sûr appliquer
plusieurs forces (disons qu'il y en a N) sur l'objet, dans des directions identiques ou
différentes, c'est la somme vectorielle de toutes ces N forces qui produira l'accélération:
inertie
mN
F...
2
F
1
F
objetl' de
a
r
r
r
r+++
=
1.1
&
L'accélération d'un objet est facilement trouvée en considérant la somme vectorielle de
TOUTES les forces qui s'exercent SUR l'objet, et SEULEMENT CELLES-CI! Le résultat de
cette somme est le vecteur "force résultante".
&
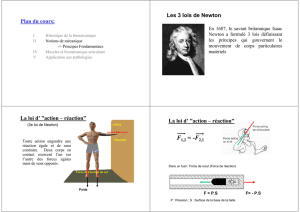
- (iii) le fait que je sois entraîné par le caddie alors que je suis en train de le retenir pour le
freiner m'indique que si j'exerce une force sur un objet, celui-ci exerce une force sur moi et de
sens contraire. En fait, si un objet A exerce une force sur un objet B, B exerce une force sur A
de même grandeur et de même direction, mais de sens opposé: c'est la troisième loi de
Newton ou loi des actions réciproques.
2. Types de forces
Certaines forces, dites fondamentales (mais les physiciens me disent qu'elles ne seraient que
des expressions variées d'une seule et unique force), sont à la base de toutes les forces
"macroscopiques" que l'on peut rencontrer dans la nature. Si je suis attiré par la terre, c'est à
Stéphane Swillens - édition 2009

&
II. Dynamique
&
II.4
cause de la force gravitationnelle. Si deux électrons se repoussent, c'est à cause de la force
électrique.
2.1 Force électrique
Deux objets ponctuels "chargés électriquement" (la charge électrique est une des propriétés
fondamentales de la matière) se repoussent si leurs charges respectives (q et Q) sont de même
signe, ou s'attirent si leurs charges sont de signes opposés. La grandeur de cette force est
fonction du produit des charges de ces deux objets ponctuels et est inversement
proportionnelle au carré de la distance r qui les sépare:
2
r
qQ
k
électrique
F= 2.1
Le coefficient k est la constante de Coulomb. Si je veux connaître la trajectoire que suivra un
objet chargé soumis à la force électrique, il suffira d'écrire explicitement cette force dans
l'équation de Newton 1.1, de diviser par la masse d'inertie de l'objet chargé, ce qui
déterminera l'accélération. Les techniques de la cinématique seront ensuite appliquées pour
déterminer vitesse et position.
2.2 Force gravitationnelle
Alors que la force électrique est créée par les charges mises en présence, la force
gravitationnelle est créée par la présence de masses. Deux objets ponctuels de masses m et M
s'attirent avec une force dont la grandeur est fonction du produit de leurs masses et est
inversement proportionnelle au carré de la distance r qui sépare les deux objets ponctuels
(cette force est toujours attractive!):
2
r
mM
G
nnellegravitatio
F= 2.2
Le coefficient G est la constante gravitationnelle. Une remarque importante en passant: si les
objets ne sont pas ponctuels, r est alors la distance qui sépare les centres de masses des deux
objets. Ainsi, sur base de l'éq 2.2, je peux dire que les objets se trouvant à la surface terrestre
subissent une force attractive dirigée vers le centre de la terre valant:
)
2
terre
rayon
terre
M
G(
objet
m
terrestreattraction
F= 2.3
Le terme entre parenthèses est le champ de pesanteur à la surface de la terre et est symbolisé
par g (environ 9.8 m/s
2
). Ce champ de pesanteur est créé par la masse de la terre. Si je veux
Stéphane Swillens - édition 2009

&
II. Dynamique
&
II.5
étudier le mouvement d'un objet à la surface terrestre, je devrai donc utiliser comme force
gravitationnelle appliquée sur l'objet, une force verticale dirigée vers le bas et valant m
objet
g.
La loi de Newton (eq 1.1) devient alors:
inertie
m
g
objet
m
objetl' de
a
r
r= 2.4
Il a fallu attendre Einstein et la théorie de la relativité pour comprendre ce qui était admis par
l'expérience dans le cadre de la théorie de Newton, à savoir que la masse de l'objet m
objet
responsable de la force gravitationnelle est égale à la masse d'inertie de l'objet m
inertie
(voir
aussi le paragraphe 5.2 ci-dessous). En conséquence, l'accélération de tout objet tombant à la
surface terrestre et soumis seulement à la force gravitationnelle (en absence donc de tout
frottement) est la même, quelle que soit sa masse, et vaut g. Ce n'est pas étonnant dès lors que
j'ai pu aborder dans le chapitre traitant de la cinématique le problème du mouvement d'un
objet lancé à la surface terrestre sans devoir faire appel à l'équation de Newton: en effet,
l'accélération d'un objet due à la force d'attraction terrestre est toujours g.
&
mg est la force gravitationnelle exercée par la terre sur un objet de masse m situé à la
surface terrestre.
&
2.3 Forces de contact
Mon bac de bière posé sur le sol horizontal, bien qu'attiré par la terre, ne s'enfonce pas dans le
sol. De même, la charge soulevée par une grue, bien qu'attirée par la terre, est maintenue en
l'air grâce au câble de la grue qui ne se rompt pas. Ce sont des forces d'interactions
intermoléculaires, assurant donc la cohésion des molécules du sol ou du câble, qui sont
responsables de ce que sol et câble retiennent l'objet en exerçant une force dirigée vers le
haut. En fait, si le bac et la charge sont immobiles, c'est parce que la force qui les supporte
compense la force gravitationnelle mg, de telle sorte que la force résultante est nulle (voir
1ère loi de Newton).
Que se passe-t-il au niveau de la force exercée par le sol horizontal sur le bac? Comme je
viens de le constater, la force de contact entre le sol et le bac présente une composante
normale (symbolisée par le vecteur qui est dirigé N
rperpendiculairement au plan du sol et
vers le haut), qui empêche le bac de pénétrer dans le sol et ce, à cause de la cohésion des
molécules constituant le sol. Si je déplace le bac en le poussant du pied, j'entends un
Stéphane Swillens - édition 2009
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%