Le multiplexage automobile

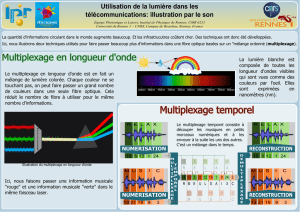
Le multiplexage

Les thèmes abordés
•Pourquoi le multiplexage ?
•Les principes du multiplexage

Prenons l’exemple du secteur automobile
L’électronique automobile est en évolution
constante :
Exigences de plus en plus sévères en matière de pollution
Améliorations en matière de sécurité et de confort
Evolution en cours de vie du véhicule (options)
Pourquoi le multiplexage ?

D’où une croissance constante, ces 5 dernières
années, des fonctions électroniques :
ABS, REF, MSR, ESP, ASR
Direction à assistance variable, BVA, suspension pilotée,
gestion moteur
Airbag, anti-démarrage, clim. régulée, détection du sous-
gonflage des roues, aide au stationnement
Allumage automatique des feux de croisement, essuie-vitre
automatique, correction de site des feux (lampes au Xénon)
Allumage automatique des feux de détresse en cas de forte
décélération ou de choc (1ère mondiale sur la Peugeot 607)
Régulation de vitesse avec radar anti-collision, navigation
par satellite
Et à venir : direction et freins entièrement électrique,
guidage du véhicule par rapport aux « bandes blanches », …
Pourquoi le multiplexage ?

Ce renforcement de l’électronique se traduit par :
Une du nombre de calculateurs
Une du nombre de capteurs
Une des faisceaux de câbles électriques : encombrements,
poids et coûts
Pourquoi le multiplexage ?
MCN001
LA DIMINUTION DU VOLUME DU CABLAGE : ENJEU MAJEUR 95 -2000
EVOLUTION DU CABLAGE
1960 1985 1995
0
200
400
600
800
1000
1200
1400
1600
1800
1960 1985 1995
NOMBRE D’INTERCONNEXIONS
1960 1985 1995
0
200
400
600
800
1000
1200
1400
1600
1800
2000
1960 1985 1995
METRES (longueur de cablage)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%