Machine à courant continu

1
Machine à courant continu
Introduction - Régimes transitoires d’une machine à courant continu
• Ceux relatifs à la mise en œuvre
• amorçage
• stabilité
• Fonctionnement perturbé
• variation brusque de la tension d’alimentation
• variation de couple
• variation de l’excitation pour les machines à excitation séparée
• Problèmes de réglage
• Pour faire varier la vitesse, on fait faire varier la tension d’alimentation
• Sur une petite plage, on peut faire varier la tension d’excitation
• Problèmes liés à l’alimentation par des sources non constantes
• Actuellement on part d’une tension fixe que l’on hache ce qui permet de
faire varier la tension moyenne mais cela entraîne des créneaux.
Mise en équation
v
i
s1
2
v
v
qr
s
s
2
i
s
1
i
q
r
d
d
d
d
r
s
1
s
2
q
d
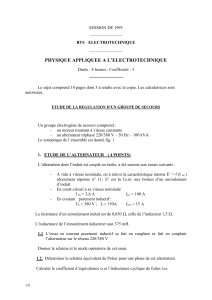
L’axe direct est l’axe des pôles et l’axe interpolaire est l’axe q. Un enroulement
rotorique rejoint les balais sur l’axe q. Deux enroulements sont repérés sur l’axe d.
Pour plus de généralité, on placera, dans le cas d’une machine compound, un
enroulement série et un enroulement parallèle.

2
Les équations de la machine sont alors :
v
v
v
RLsMs
MsRLs
M M RLs
i
i
i
ds
ds
qr
ds ds ds ds
ds ds ds ds
mqrds mqrds qr qr
ds
ds
qr
1
2
1 1 1 2
2 1 2 2
12
1
2
0
0
=+++
ω ω
Le couple est donné par
(
)
(
)
TpiMiMi
epqr qrds ds qrds ds
= +
11 2 2
Dém : Voir dans le chapitre précédent l’exemple sur la machine avec collecteur.
Ces équations représentent le fonctionnement de la machine en régime permanent
et en régime transitoire.

3
Machine à courant continu en régime permanent
Les enroulements peuvent être disposés de plusieurs façon différentes :
• en série avec le rotor, on a la machine série,
• en parallèle avec le rotor, on a la machine shunt,
• s’ils sont alimentés par une source auxiliaire on a la machine à excitation séparée
• Avec un enroulement série et un enroulement en parallèle (ou à excitation
séparé),on a la machine compound.
•
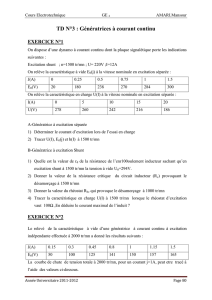
Etude de la machine compound
S1 désigne l’enroulement induit série et S2 l’enroulement d’excitation (Rf, Lf)
i
s
f
v
v
r
i
s
f
s
i
f
s
1
s
2
q
d
s
v
r
i
q
d
d
s
s
v
r
iq
r
s
Flux additif
Flux soustractif
aia
q
On peut appliquer l’équation précédente :

4
v
v
v
RLsMs
MsRLs
M M RLs
i
i
i
ds
ds
qr
rffs
sf s s
maf mas a a
ds
ds
qr
2
1
2
1
0
0
=+++
ω ω
Il faut exprimer les tensions réelles. Notons ia le courant induit et v
a la tension
induite. i i
qr a
=
v v
qr a
=
i i
ds f
2
=
v v
ds f
2
=
i i
ds a
1
=
±
v v
ds s
1
=
Selon que le flux est additif ou soustractif : v v v
qr ds
=
±
1
Posons R= Ra + Rs et L = La + Ls
On obtient : v
v
RLsMs
M M sRLs Mi
i
ff f sf
maf sf mas
f
a
=+ ±
± ± ±
ω ω
Le couple est donné par
(
)
TpMi i Mi
epaf afas a
= ± 2
On a :
• un signe + pour un moteur à flux additif ou une génératrice à flux soustractif
• un signe - pour un moteur à flux soustractif ou une génératrice à flux additif.
Ces équations sont valables en régime transitoire ou en régime permanent. Dans ce
dernier cas on pose alors s = 0.

5
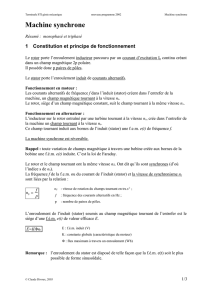
T
e
ia
Représentation du couple pour un moteur à flux additif
Machine série
L’étude se ramène au cas précédent en supprimant l’enroulement à excitation
séparé.
On obtient alors en régime permanent :
(
)
vRMI
mas a
= +ω et TpM i
epas a
=2
ia
T
e
ω
r
Représentation du couple et de la vitesse pour un moteur série
Machine à excitation séparé ou shunt en régime permanent
vRIMI
a a maf f
=
+
ω
et TpM i i
epaf af
= avec v constant
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%