ImpRo - Tâche 2B Livrable 2.3 : Implémentation du

ImpRo - Tâche 2B
Livrable 2.3 : Implémentation du démonstrateur
Jean-Luc Béchennec, Sébastien Faucou, Richard Urunuela,
Armel Mangean, Benjamin Sientzoff
CNRS, Université de Nantes, École Centrale de Nantes.
UMR 6597 IRCCyN.
Nantes, France.
31 août 2014
1

Table des matières
1 Introduction 4
1.1 Présentation du démonstrateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Présentation du système . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.2 Faisabilité...................................... 4
1.1.3 Adéquation aux besoins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Tempsréel ......................................... 6
1.2.1 Concurrence et distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.2 UtilisationdeCOTS ................................ 6
1.3 Planning prévisionnel de la réalisation . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Le démonstrateur 7
2.1 TrampolineetlabriqueNXT................................ 7
2.1.1 LeRTOSTrampoline................................ 7
2.1.2 Labrique ...................................... 8
2.2 Lesjoueurs......................................... 8
2.2.1 Conceptioninitiale................................. 8
2.2.2 Lelogicielembarqué................................ 11
2.2.3 Communication à distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.4 Les évolutions et différentes versions . . . . . . . . . . . . . . . . . . . . . . 11
3 Modèles temporisés 14
3.1 Automatestemporisés.................................... 16
3.1.1 Graphedesrégions ................................ 17
3.1.2 Graphedeszones ................................. 18
3.2 Réseaux de Petri temporels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.1 Graphe des classes d’états . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Réduction des automates temporisés 21
4.1 Principederéduction.................................... 22
4.2 Détection des comportements irréalistes . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3 Implementationd’unoutil ................................. 23
5 Synthèse de paramètres 24
5.1 Principe de la paramétrisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.2 Synthèse de paramètres entiers bornés . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.3 Implémentationd’unoutil ................................. 26
6 Modélisation 27
6.1 Modélisation architecturale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.1.1 Première spécification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.1.2 Secondespécification............................... 29
6.2 Modélisation comportementale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.3 Analyse ........................................... 34
2

7 Annexes 35
7.1 ModèlesAADL ....................................... 35
7.2 ModèlesUPPAAL ..................................... 39
7.3 ModèleRoméo....................................... 43
8 Références 45
3

1 Introduction
Le système présenté dans ce document est proposé pour servir de démonstrateur dans le
cadre du projet ImpRo 1. À ce titre, il intègre les caractéristiques suivantes :
—temps réel : le système comporte des processus qui évoluent en temps réel et qui inter-
agissent avec des processus informatiques ;
—concurrence et distribution : les processus informatiques du systèmes communiquent entre
eux ;
—utilisation de COTS : le système est construit à l’aide de composants logiciels sur étagère.
Les compétences des membres de l’équipe systèmes temps réel de l’IRCCyN impliqués dans
cette tâche sont dans le domaine des systèmes temps réel embarqué. Le démonstrateur proposé
relève donc de ce domaine. Dans ce document nous présentons la création d’un prototype puis la
modélisation et la vérification faite du modèle.Le travail attendu est la réalisation d’une étude de
cas non-triviale sur la robustesse des modèles temporisés s’appuyant sur le démonstrateur que
nous présentons en première partie. Ce travail s’articule en plusieurs volets : la création du pro-
totype , la modélisation du démonstrateur, l’implémentation du modèle réalisé et des vérifications
formelles et pratique des propriétés du modèle.
1.1 Présentation du démonstrateur
1.1.1 Présentation du système
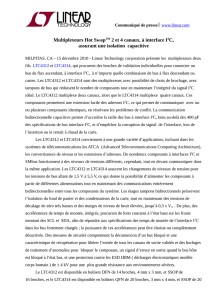
Le démonstrateur est un système de deux robots qui jouent à un jeu inspiré du Air Hockey.
Dans ce jeu, chaque joueur cherche à faire sortir la balle du terrain par le côté du joueur adverse.
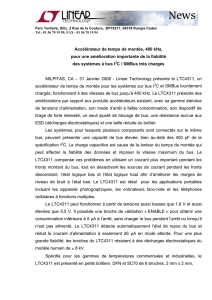
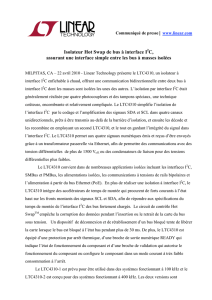
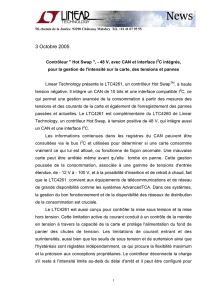
Le terrain est représenté vu du dessus sur la figure 1 et en perspective isométrique sur la
figure 2. Le terrain est rectangulaire. Les longueurs sont équipés de rebords sur lesquels la balle
vient rebondir.
Les robots sont équipés d’un dispositif permettant de récupérer et de frapper la balle. Les
robots sont équipés de roues non directrices. Il se déplacent dans le sens de la largeur du terrain,
sur des rigoles.
Pour déterminer la position à atteindre pour pouvoir frapper la balle, les robots interrogent une
station centrale qui fournit la position et l’accélération de la balle. Cette information est capturée à
l’aide d’une caméra située au-dessus du terrain. La station centrale fournit également la base de
temps du système.
1.1.2 Faisabilité
Les robots sont réalisés à l’aide du kit robotique Lego Mindstorms NXT.
Le système d’exploitation temps réel trampoline est utilisé pour exploiter les microcontrôleurs
qui équipent ces kits. Ce système d’exploitation est un logiciel libre dont le développement est
principalement assuré par l’équipe systèmes temps réel de l’IRCCyN. Il existe déjà un BSP (board
support package) trampoline pour la plate-forme Lego Mindstorms NXT. Pour permettre la réa-
lisation du projet, il faudra compléter ce BSP pour offrir le support des capteurs et actionneurs
utilisés.
1. ImpRo, ANR-2010-BLAN-0317,
4

C
R1
~
V
R2
FIGURE 1 – Vue du dessus
C
FIGURE 2 – Vue en perspective isométrique
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%