Ressort vertical : équation différentielle - Exercice de physique

Page 1 sur 2
Ressort vertical : équation différentielle
I) LES HYPOTHESES
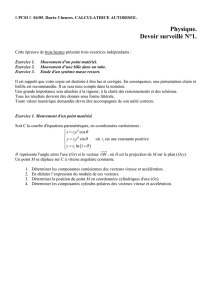
1) Un ressort de constante de raideur k est accroché à un point B .Sa longueur à vide est l0.
Schéma 1 : le ressort est à vide selon une direction verticale
2) Schéma 2 :on suspend une masse m = 2OO g de très faible épaisseur à l’extrémité mobile A0
Le centre de gravité de la masse est alors en Geq. La masse est en équilibre dans le référentiel Galiléen Terrestre. Le champ de
pesanteur est uniforme.
Du fait de la faible épaisseur Geq = A (A est la nouvelle position de l’extrémité libre du ressort)
La nouvelle longueur du ressort est leq
3) Schéma 3 : on tire sur le ressort puis on le lâche sans vitesse initiale.
Du fait de cet écart à l’équilibre la masse se met à osciller de part et d’autre du point Geq
On néglige tous les frottements.
On définit un repère d’espace (O,;k), tel que Geq = O (schéma 1 et schéma 2)
II) QUESTIONS
1) Effectuer un bilan des forces sur la masse m quand celle –ci est en équilibre.
2) En déduire la relation vectorielle entre le poids et la force de rappel
3) Donner l’expression littérale de k.
G est une position quelconque du centre d’inertie de la masse.
4) Faire un bilan des forces pour cette position quelconque. Exprimer la force en fonction de l’allongement vectorielle.
A0
A0
A0
Geq
Geq
G
;k
;k
Schéma 1
Schéma 2
Schéma 3
B
B
B

Page 2 sur 2
5) Par application de la deuxième loi de Newton en déduire une relation entre les vecteurs forces et l’accélération ;aG
du centre d’inertie.
6) Par application de la relation de Chasles faire apparaître le point Geq = O (origine du repère d’espace)
7) En déduire une expression plus simple de l’équation établie grâce à la deuxième loi de Newton.
8) Exprimer les vecteurs en fonction du vecteur unitaire ;k.
9) En déduire l’équation différentielle du mouvement du point G
10) De quel type est cet oscillateur
11) Déterminer la pulsation propre ω0
12) En déduire l’expression de la période propre T0
13) Donner la solution de l’équation différentielle z(t) en précisant le nom des constantes.
Conclusion :
Comparer les mouvements du dispositif vertical au mouvement du dispositif horizontal.
1
/
2
100%