TP03 part2 MICRO 2014

Thème : Son et musique Domaine d’étude : Emetteur et récepteur sonores
TP03 Partie2 : Le microphone
Un microphone convertit les ondes sonores en signaux électriques : c’est un transducteur électro-acoustique.
Comment fonctionne un microphone ? Quelles sont ses principales caractéristiques ?
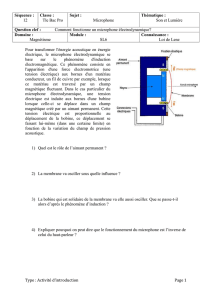
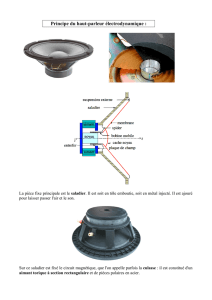
Doc1 : Constitution et principe du microphone électrodynamique
Un microphone électrodynamique est constitué de deux éléments principaux :
une bobine (formée à partir d’un enroulement d’un fil conducteur) et un aimant.
La bobine est mobile, elle est placée dans le champ magnétique créé par l’aimant qui,
lui, est fixe.
Une membrane souple, solidaire de la bobine, capte les vibrations de l’air engendrées
par une onde sonore.
Les déplacements de la bobine, provoqués par ceux de la membrane dans le champ magnétique de l’aimant, créent une tension
électrique induite u aux bornes de la bobine. C’est le phénomène d’induction électromagnétique.
La fréquence de la tension électrique obtenue est égale à celle des vibrations de l’air, donc à celle du son correspondant à ces vibrations.
L’amplitude de cette tension est d’autant plus grande que le niveau d’intensité sonore est grand.
Visualiser l’animation « 4) Microphone»
Doc2 : Caractéristiques techniques d’un microphone
La sensibilité est son aptitude à fournir une tension élevée pour des sons de faible niveau d’intensité sonore.
Un microphone de grande sensibilité captera bien les sons peu intenses, mais sera sensible aux parasites sonores.
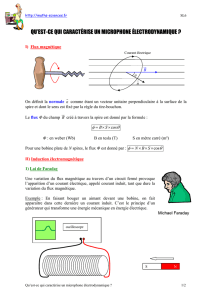
La bande passante est le domaine de
fréquences qu’il capte convenablement
(variation du niveau de +ou- 3dB par
rapport à la référence de 0dB).
Elle se déduit de la courbe de réponse du
microphone (ci-contre). Cette courbe est la
représentation graphique du niveau de
sortie, exprimé en dB, en fonction de la
fréquence du son qu’il capte dans l’axe de la
source. Par convention, on affecte le niveau
0 dB à la valeur obtenue pour 1000 Hz.
La directivité est une caractéristique essentielle du microphone : elle caractérise sa sensibilité en fonction de la provenance du son
selon son axe central.
Un micro omnidirectionnel capte sans atténuation les sons provenant de toutes les directions ;
un microphone unidirectionnel capte sans atténuation les sons provenant d’une seule direction.
L’axe du microphone est l’axe défini par l’angle = 0°, la membrane pointant vers la graduation 0°. On déplace la source sonore le
long d’un cercle centré sur le microphone. On compare la réponse du microphone pour une position à celle obtenue lorsque la
position de la source est repérée par = 0°. Cela permet de calculer un niveau de réponse, exprimé en dB.
Une valeur négative traduit un microphone qui capte moins bien les sons dans la direction que dans la direction de référence (0°).
Commutation incorporée possible pour modifier
la courbe de réponse selon l'emplacement du
microphone par rapport à la source sonore

Travail à effectuer : Réaliser
Avec le matériel disponible, proposer un protocole (schéma et explications) qui permet de vérifier, en réalisant des mesures
expérimentales, que la fréquence fu de la tension induite est égale à la fréquence fa du mouvement de l’aimant par rapport à la bobine.
Matériel disponible : aimant droit ; bobine 500 ou 1000 spires ; potence ; ressort ; fils de connexion ; chronomètre.
Interface d’acquisition orphy-GTS2 ; logiciel orphyGTS2; logiciel « Régresssi » .
Analyse
La courbe de réponse et le diagramme de directivité du microphone Shure SM58 (pour des sons de fréquences 125, 2000 ou 8000 Hz.)
sont donnés ci-dessous.
1. Le micro Shure SM58 est-il omnidirectionnel pour les sons de fréquence 125, 2000 et 8000 Hz ? ………………………………………………
…………………………………………………………………………………………………………………………………………………………………………………………………………………..
………………………………………………………………………………………………………………………………………………………………………………………………………………….
Quelle est la fréquence la moins atténuée par ce micro en arrière de lui (de 150° à 180°) ? ……………………..
Quelle est la fréquence la plus atténuée par ce micro en arrière de lui (de 150° à 180°) ? …………………………….
2. Quelle est la largeur de la bande passante à 0 dB du micro Shure SM58 ? …………………………………………………………………………………
Synthèse argumentée
Expliquer la réversibilité d’un transducteur électroacoustique. Pour ce faire, comparer la constitution du HP et du micro
électrodynamiques, leurs principes de fonctionnement et leurs caractéristiques. Identifier les transferts d’énergie qui y ont lieu.

Corrigé synthèse argumentée
Un transducteur électroacoustique est un appareil qui est capable de transformer un signal électrique en une onde sonore et
inversement. Le microphone et le haut-parleur en sont 2 exemples. Leur réversibilité, c'est-à-dire pour le microphone de
pouvoir se comporter en haut-parleur ou pour le haut parleur de pouvoir se comporter en microphone vient de leur
constitution semblable.
En effet, le microphone électrodynamique et le haut parleur électrodynamique sont tous les deux constitués une membrane
souple solidaire d’une bobine capable de se translater librement sur l’axe fixe d’un aimant permanent.
Au départ le haut-parleur est prévu pour transformer l’énergie électrique en énergie mécanique. Dans la bobine circule un
courant électrique alternatif qui engendre l’apparition d’une force de Laplace. Celle-ci provoque des oscillations de la bobine.
La membrane solidaire de la bobine génère une onde sonore image du signal électrique.
Le microphone quant-à lui transforme l’énergie mécanique d’une membrane vibrant sous l’action d’une onde sonore. Aux
bornes de la bobine solidaire de la membrane apparait un courant induit. Le signal électrique produit est image de l’onde
sonore.
i
1
/
3
100%