Projets Automne 2015 - Polytechnique Montréal

Projets
GBM8320 – Dispositifs médicaux intelligents
(DMI 2015)
Mohamad Sawan, professeur
Mohamed Zgaren, chargé de laboratoire
Département de génie électrique
Polytechnique Montréal
Présentation des projets
Local M2204
Pavillon Lassonde
Décembre 2015

GBM8320, Projets (suite)
Session Automne 2015
Page 2 de 43
GBM8320-Dispositifs Médicaux intélligents (DMI’15)
Présentation de projets
Mardi 10 décembre 2015, 12h45-18h00
P#
Heure
Auteur
Titre du projet
Page
Programme
2
Formulaire d’évaluation
3
13h40 Début
1
12h45
Belzil, A.
Conception d’un micro stimulateur pour tissu
cardiaque à étages de sorties multiples
4
2
13h10
Boubée de Gramont, F.
Biocapteur CMOS pour la détection et la mesure
de la concentration de neurotransmetteurs
8
3
13h35
Campbell, P.
Convertisseur AC/DC de faible puissance pour
l’interface d’un lien inductif
12
4
14h00
Diouf, Y.
Filtre passe-bande en technologie CMOS pour
l’acquisition de signaux biologiques
16
14h25 Pause
Break
5
14h45
Hashemi N., F.
A Low Voltage CMOS Bandgap Voltage
Reference for Biomedical Application
20
6
15h10
Honarparvar, M.
Semi-time Mode Analog Front-end Compatible
with Time Domain Incremental TDC
24
8
16h00
Laurent, É.
Conception d’un ampli d’instrumentation pour
mesurer l’ECG de rongeurs
32
7
15h35
Najarpour F., A.
A 60-dB CMOS Signal Amplifier for Wireless
Extracellular Neural Recording System
28
9
16h25
Trigui, A.
Quadrature Carrier Width Modulation Front-
End Demodulator for Micro-Implants
36
10
16h50
Yabi, N.
Un filtre préliminaire passe-bande 0.4-60Hz
réalisé avec une configuration OTA-C 1.8V,
CMOS 180nm
40
17h15 Fin

Conception d’un micro stimulateur pour tissu cardiaque à étages de sorties
multiples
Par Antoine Belzil
Abstract - Cet article décrit la conception d’un stimulateur
pour un tissu afin de lui permettre de différencier ses
cellules souches pluripotentes en cellules cardiaque
automatique dans le but ultime de trouver une alternative
aux pacemakers électriques. La stimulation active produite
par le système est créée par l’alternance de phase de l’ordre
des nanosecondes afin de n’utiliser un condensateur de
petite taille, mais d’obtenir un courant traversant le tissu en
continu. Deux modèles de tissu ont permis la validation du
circuit, un linéaire et l’autre segmentaire, ce dernier
permettant une analyse électrique à l’intérieur du tissu. Les
résultats obtenus démontrent un potentiel aux bornes du
tissu de 8.35V/cm à 16.58V/cm, quoique ces résultats
puissent être réduits en jouant sur le courant imposé dans le
circuit.
I. Introduction
Les bradyarythmies correspondent aux conditions de
rythmes cardiaques faibles ou inappropriés. Dans la
plupart des cas, ces conditions peuvent être réglées par
l’implantation d’un pacemaker électronique. Ces
derniers ne sont pas toutefois exempts de leur lot de
complications. Il serait alors possible de contourner ces
complications et les limitations des pacemakers
électroniques si un regain du fonctionnement normal
du nœud sinusal ou l’automatisation de façon
biologique était possible. Dans l’objectif de développer
la seconde option à-travers le développement de patchs
biologiquement ingéniés à partir de cellules
pluripotentes, l’optimisation d’un système de stimuli
électrique miniature est requis. Le présent ouvrage
traite la conception d’un tel système permettant la
stimulation d’un tissu cardiaque (myocarde) simulée
grâce à une stimulation en alternance de phase au
travers multiples étages de sorties et un système de
protection du tissu grâce à un condensateur de taille
minimale. Plus précisément, l’objectif était de permette
une stimulation d’au moins 5V/cm, ce qui est
caractéristique du myocarde natif [1], grâce à trois
étages de sorties au travers un tissu simulé par un
réseau de résistance et condensateur représentant un
tissu cardiaque. Le circuit conçu devrait être de taille
assez petite pour son addition à une lamelle de
microscope où le tissu cardiaque réel sera développé.
II. Méthodologie
La première partie consistait à la réalisation d’un tissu
cardiaque formé de condensateurs et résistances, la
seconde, à la conception d’un étage pour générer les
phases de stimulations requises, et la suivante, à la
réalisation d’un étage de sortie permettant la
génération d’un voltage continu aux bornes de sortie
en alternance avec une phase de relaxation. La
complexité de cette dernière provient du fait qu’un
condensateur permettant la protection du tissu pour
une telle stimulation en continu est très élevée et prend
donc beaucoup de place sur un circuit. La dernière
partie consistait en la mise en commun des trois
premières parties, avec une alimentation de 1.8V que
l’optique du projet ne considérait pas et qui a donc été
traité comme idéal et déjà présente sur la lamelle.
Plusieurs étages de sortie seront utilisés comme dans
les travaux de Soulier et al [2].
Dans ce projet, deux représentations du myocarde ont
été réalisées. La première est sa représentation par une
résistance de 100K ohms. Cette valeur provient du
choix d’un tissu représenté simplement comme la
combinaison de 10 cellules d’impédance interne infinie
distancées également de 100µm avec une résistance
entre elle de 100 ohms-cm [3]. Le tissu fut simplement
représenté ainsi pour ne se concentrer que sur le circuit
de stimulation et pour simplifier la propagation des
potentiels d’action le long des fibres musculaires.
La seconde est une couche 2D divisée en segments de
100µm x 100µm. Dans cette couche, les sarcolemmes
et l’espace intracellulaire sont représentés de manière
similaire aux travaux de Spach et Heidlage [4].
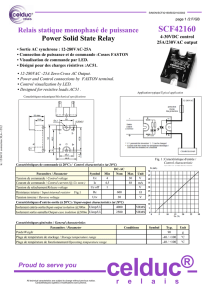
Figure 1 : Schéma du modèle segmentaire du myocarde
Chaque circuit résistance (Rm) et condensateur (Cm)
représente les faces supérieures et inférieures du
segment de la couche de tissu. Le tissu sera considéré
isotrope afin d’éviter les complications reliées aux
chemins préférentiels de propagation. La
représentation 2D sera donc homogène avec des
résistances de couplages (Ri et Ri’) égales (figure 1).
Cette représentation permet un réalisme plus élevé et la
possibilité de faire des analyses plus détaillées sur la

propagation du courant à l’intérieur du tissu. Le
tableau 1 liste les valeurs des composantes utilisées
pour la réalisation des modèles 2D. Les valeurs sont
basées sur les travaux de Joyner et Spach [3] [4].
Table 1 : Composants électriques du tissu cardiaque
Composantes
Modèle linéaire
Modèle
segmentaire
Rm
∞
1000 Ω·cm2
Cm
0
1µF/ cm2
Ri
100 Ω·cm
100 Ω·cm
Le générateur de phase fut conçu de façon à permettre
des phases 1 et 2 alternant à la fréquence donnée par
l’entrée 1 pour une durée déterminée par l’entrée 2.
Ces phases produisent une sortie à voltage de 0
lorsqu’actives permettant dans l’étage de sortie
l’ouverture et la fermeture des switchs. De plus, durant
la phase active de l’entrée 2 où les phases 1 et 2 sont
actives, la phase 3 est générée en continu à un voltage
égal à Vdd. Le générateur a été conçu pour prendre en
entrée des ondes carrées. Comme la fréquence
d’alternance de la phase 1 et 2 est très élevée, les
portes logiques composant le circuit furent réalisées à
partir de transistors seulement afin de réduire le temps
d’élévation et de chute du courant et de rendre la sortie
la plus carrée possible. Également, des expériences sur
Cadence ont démontré que l’utilisation en série de
deux inverseurs permet une génération d’onde encore
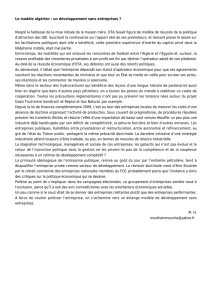
plus carrée. La figure 2 présente la schématique
réalisée pour le générateur de phase ainsi que ses
portes logiques.
Figure 2 : a) Porte logique NAND, b) porte logique NOT et c)
circuit du générateur de phase utilisant portes logiques a) et b)
L’étage de sortie fut réalisé à l’aide de transistors nmos
et pmos, et d’un condensateur. Dans un système de
stimulation, un condensateur peut être mis en série
avec les électrodes afin de rendre la stimulation
sécuritaire. Dans la période de stimulation, le
condensateur accumule des charges. Dans la phase de
repos ou décharge, le courant anodique neutralise les
charges accumulées. Dans le cas d’un bris des semi-
conducteurs, grâce à au condensateur il n’y aura pas
d’exposition prolongée du tissu au courant DC une fois
saturée. Cependant, comme une stimulation est d’une
durée de l’ordre des millisecondes, les capacités
requises sont de plusieurs µF [5]. Le volume des
condensateurs étant dans les alentours de 5mm3/µF [5]
pour un système comportant plusieurs étages de sorties
les condensateurs prendrait autant sinon plus d’espace
que le reste des composantes du système. Selon
l’équation 1 décrivant la relation capacité-courant, il
est possible de voir l’impact du temps de stimulation
sur la capacité pour une différence de potentiel donnée.
La capacité utilisée pour les simulations fut de 50nF,
soit plus de 100 fois plus petite que celles
normalement utilisées pour des circuits de stimulation.
𝐼𝑠= 𝐶 𝑑𝑉
𝑑𝑡 (1)
Le principe du circuit de sortie repose sur l’alternance
rapide (MHz ou GHz) entre les phases 1 et 2 durant la
stimulation afin de permettre l’utilisation de capacités
très faibles. Comme ces deux phases permettent
chacune la stimulation avec la même amplitude durant
la même période de temps en alternance, si le courant
passe au travers de la résistance ou tissu dans le même
sens, le résultat final est équivalent à une stimulation
en continu. Afin de permettre ce trajet au courant et un
courant au sens alternant dans le condensateur, un pont
de diode a été utilisé. Ces diodes furent dans un
premier temps idéales et par la suite réalisées à l’aide
d’un seul transistor monté en diode, soit pour un nmos,
la Gate connectée à la Source. Pour trouver les
paramètres de chacune des diodes, une analyse
paramétrique fut réalisée grâce au logiciel Cadence.
Comme pour l’étage de génération de phase, les
switchs ont été réalisés avec des transistors seulement
afin de permettre une transition quasi-parfaite entre
chacune. Les transistors de la technologie 0.18 que
nous utilisons pour le présent ouvrage fonctionnent
très bien aux fréquences désirées. Ces switchs agissent
comme des portes logiques « NOT » en plus d’ouvrir
et fermer. C’est pourquoi le générateur de phase
produit une tension nulle pour permettre aux switchs
d’ouvrir. Les valeurs des transistors contrairement à
celles des transistors des portes logiques du générateur
ont été optimisées afin de permettre une plus grande
tension aux bornes de sortie. Dans le cas des switchs,
les transistors pmos utilisés auraient pu être remplacés

par des résistances. Leurs valeurs permettent une
grande impédance, soient W=500nm et L=10µm. Les
transistors nmos permettent le changement entre les
deux différences de potentiel, et pour les optimiser,
leur impédance fut minimisée. Leur dimension sont
ainsi W=8µm et L=180nm. Ces valeurs optimales ont
été trouvées à l’aide d’analyses paramétriques sur le
logiciel Cadence.
Figure 3 : Schéma de l’étage de sortie
Le circuit final de l’étage de sortie est présenté à la
figure 3. La source de courant Istim est idéale dans le
circuit. L’objectif du projet ne nécessitant pas une
faible consommation de courant, la source fut, pour les
simulations finales, fixée à 800µA. Le courant peut
être ajusté lorsqu’une résistance beaucoup plus faible
que 100k ohms est utilisée, soit lorsqu’un tissu plus
petit est utilisé. Pour obtenir le même courant de
stimulation avec une plus faible source de courant, il
serait possible d’utiliser un miroir de courant à l’entrée
du système.
Le circuit complet permettant dans un premier temps la
stimulation de la résistance de 100k ohms et dans un
second celui du tissu (figure 4) fut réalisé en
combinant le générateur de phase, trois étages de sortie
et la résistance ou tissu. La différence de potentiel fut
relevée aux bornes de la résistance et aux bornes
centrales du tissu. Pour le tissu, deux analyses furent
réalisées, soient une stimulation à un étage de sortie au
centre du tissu et une autre avec les trois étages répartis
également aux extrémités du tissu.
Figure 4: Circuit final du projet
III. Résultats
Le générateur de phase permet la production des trois
phases désirées, soient l’alternance des phases un et
deux de 1.8V à 0V durant la stimulation et la mise à
0V de la phase trois durant la relaxation ou stimulation
passive. Cependant, malgré l’utilisation de transistor
permettant une variation de phase rapide, un décalage
de 4 ns peut être observable entre les phases un et
deux. Les entrées du générateur alternèrent de 1.8V à
0V, l’entrée un (haut) pour 500ns sur 1µs et la seconde
(bas) pour 10µs sur 20µs. À des fins de présentation
des résultats, la stimulation sur Cadence ne fut que de
10µs, mais en réalité elle pourrait être plus grande sans
que les résultats varient pour autant.
La figure 5 montre la différence de potentiel aux
bornes de la résistance de 100k ohms. La différence de
potentiel aux bornes atteint 16.58V pour la stimulation
active et 0 lors de la période de repos. Le décalage des
phases produit pour un bref instant une baisse dans le
courant passant au travers la résistance ou tissu. Ceci
produit alors des pics ressemblant à des fonctions de
Dirac à tous les changements de phases. Leur
amplitude ne représentant que le tiers de l’amplitude
totale pour une durée moindre de 5 ns, leur effet est
négligeable sur la durée de stimulation. De cette
différence de potentiel, un courant de stimulation égale
à 166µA dans la résistance est trouvable.
Figure 5 : Différence de potentiel aux bornes de la résistance de
100k ohm durant la stimulation
La figure 6 présente la différence de potentiel aux
bornes du tissu lors de la stimulation au centre
seulement (6a) et lors d’une stimulation à trois sorties
également réparties (6b). La différence de potentiel
dans les deux cas varie de façon similaire à la
résistance de 100k ohms, avec des amplitudes de
8.35V pour un étage de sortie et 14.27V et 14.55V
pour trois étages de sortie, où l’amplitude la plus
élevée est relevée aux extrémités du tissu.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)