CH 6. Le Microcontrôleur PIC16F84 de Microchip


Plan du Cours
Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
Les Microcontrôleurs
2
-CH 1. Codage de l’Information
-CH 2. Les Portes Logiques
-CH 3. Les Registres, les mémoires et les ALU
-CH 4. Introduction aux Microprocesseurs
-CH 5. Le Microprocesseur 8086 d’Intel
-CH 6. Le Microcontrôleur PIC16F84 de Microchip
-CH 7. Introduction au Microcontrôleur 16F877

Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
CH 6. Le Microcontrôleur PIC16F84 de Microchip
3
Un microcontrôleur est un composant réunissant sur un seul et même silicium
plusieurs composants. On parle de "système sur une puce" (en anglais : "System On
chip"). Il existe plusieurs familles de microcontrôleurs, se différenciant par la vitesse de
leur processeur et par le nombre de périphériques qui les composent. Toutes ces
familles ont un point commun c’est de réunir tous les éléments essentiels d’une
structure à base de microprocesseur sur une même puce.
Un microcontrôleur comprend :
- Un microprocesseur (C.P.U.) ;
- Des bus;
- De la mémoire de donnée (RAM et EEPROM) ;
- De la mémoire programme (ROM, OTPROM, UVPROM ou EEPROM) ;
- Des interfaces parallèles pour la connexion des entrées / sorties ;
- Des interfaces séries (synchrone ou asynchrone) pour le dialogue avec d’autres unités;
- Des Timers pour générer ou mesurer des signaux avec une grande précision temporelle.
Introduction aux microcontrôleurs

Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
CH 6. Le Microcontrôleur PIC16F84 de Microchip
4
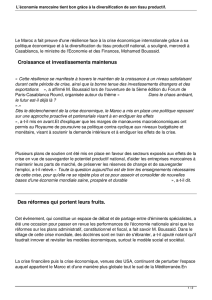
Introduction aux microcontrôleurs
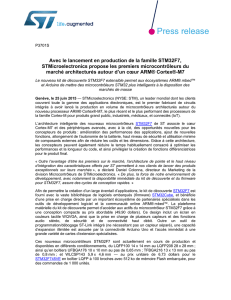
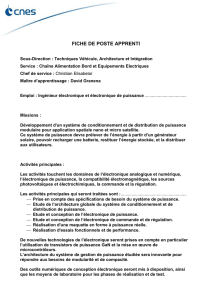
Architecture interne d’un microcontrôleur

BUS SYSTÈME
MÉMOIRE
DONNÉES CPU IO • • • • •
IO IO
BUS DONNÉES
BUS INSTRUCTIONS
MÉMOIRE
PROGRAMME
• Harvard
Les Microcontrôleurs
Lotfi BOUSSAID Microprocesseurs & Microcontrôleurs
CH 6. Le Microcontrôleur PIC16F84 de Microchip
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%