Cours Chapitre VII

Chapitre XII 1
Chap. VII
LES DETECTEURS & CAPTEURS D’INFORMATIONS
I. Rôle.
Les capteurs créent, à partir d’informations diverses prises sur l’unité de production,
des informations utilisables par Partie Commande (P.C.) afin que celle ci puisse les traiter et
élaborer les ordres adéquats aux actionneurs de la Partie Opérative (P.O.).
II. Quelques définitions.
2.1 Source d’information :
C’est une grandeur physique (déplacement, température, pression, etc.…) qui
fournit par son état (c’est une situation de mesure) ou par ses variations (c’est une
situation de comptage) une information utile à la P.C..
2.2 Destinataire des informations :
Le destinataire est la P.C. qui peut admettre les informations suivant deux
grandes familles :
ANALOGIQUE (c’est une variation continue de l’information)
Binaire ou TOR (deux états possibles 0–1)
LOGIQUE
Numérique (plus de deux états possibles)
Le destinataire se caractérise également par les conditions relatives à la nature
de l’information et à ses paramètres (Tension, courant
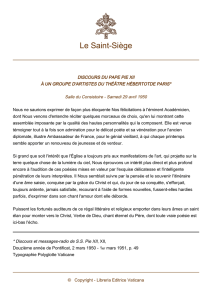
Source d’information
CAPTEUR
Destinataire des
informations
(la P.C.)

Chapitre XII 2
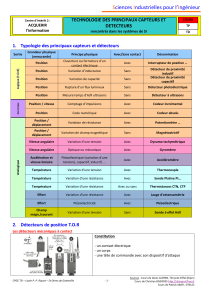
III. Classement des capteurs.
(a) En fonction de la nature de la grandeur physique à détecter.
Exemple :
Présence d’objets, de pièces, d’un déplacement…
Niveau d’un liquide, d’une poudre, de grains…
Pression d’un gaz, d’un liquide, d’un objet contre un autre…
(b) En fonction de la nature des signaux transmis.
Signal logique binaire :
Seuil haut
Seuil bas
ou
Seuil haut
Signal logique numérique :
Chaque information se présente sous la forme d’un ensemble d’états
logiques rangés dans un «mot d’état»

Chapitre XII 3
Signal analogique :
L’information se présente sous la forme d’un signal qui peut prendre
toutes les valeurs possibles entre deux valeurs limites.
Grandeur physique
Signal analogique
(c) En fonction de la nature technologique des signaux transmis.
Exemple :
De type pneumatique
De type hydraulique
De type électrique
De type électronique

Chapitre XII 4
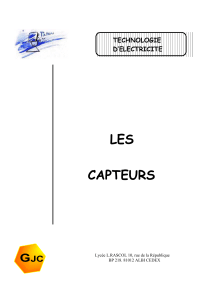
IV. Structure générale d’un capteur.
Etage de sortie dans le cas de capteurs électroniques …
Le signal de sortie d’un tel capteur est obtenu par commutation d’un transistor, d’un
thyristor ou d’un triac. En fonctionnement commutation, et vu de l’extérieur, le
composant électronique peut être assimilé à un contact électrique qui se ferme ou
s’ouvre, mais de façon imparfaite.
Rappel du principe de fonctionnement d’un transistor en commutation :
Etage bloqué ⇔ à un contact ouvert présentant une résistance non infinie.
Etage saturé ⇔ à un contact fermé présentant une résistance non nulle.
Les caractéristiques principales sont :
- Tension nominale de fonctionnement
- Courant maximal admissible
- Valeurs min. et max. de la résistance apparente de sortie ou plus
souvent, le courant résiduel à l’état bloqué et la chute de tension à
l’état saturé du circuit de sortie.
Source d’information
(grandeur physique à détectée)
informations
transmise à la P.C.
Etage de
détection
Etage de
sortie

Chapitre XII 5
Caractéristiques de montage.
Types « 2 fils »
- Généralement non polarisés ils ne nécessitent donc pas de repérage spécifique
des bornes de montage.
- Ils se raccordent indifféremment sur les entrées automate à logique positive ou
négative.
- Il existe un courant résiduel et une tension de déchet, dont il faut vérifier leur
compatibilité avec les seuils de basculement des entrées automate utilisé.
- Association :
Série
Parallèle
Types « 3 fils »
- Ils sont alimentés exclusivement en courant continu :
2 fils pour l’alimentation (notés + et – coef. schéma ci-dessous).
1 fil pour la transmission du signal(noté S coef. schéma ci-dessous).
- Ils sont généralement protégés contre l’inversion des fils d’alimentation.
Entrée automate
Entrée automate
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%