Les Moteurs

1
BOUGON Kévin
DALMONT Clément
PRATO Damien
DAUNOIS Julian
LE GUYADER Vincent
RECOUVREUR Julien
Etude d’un banc moteur
Etat de l’art
Introduction :
Avant d’utiliser le banc moteur à notre disposition, il est important de comprendre le
fonctionnement de cet appareil et de connaître son utilité. Ces informations que nous voulons concises
sont destinées aux non initiés (comme nous) qui débutons sur ce projet d’étude.
Un banc moteur peut être perçu comme une table d’expérimentation qui permet de caractériser
un moteur. Il est également destiné à l’amélioration des capacités du moteur. Cette étude s’effectue en
positionnant le moteur dans différentes phases de fonctionnement afin de déterminer la puissance et le
couple délivrés par le moteur dans ces différentes phases. Les contraintes peuvent être exercées de
plusieurs manières différentes sur le moteur, comme par exemple le banc moteur à frein ou celui à
inertie. Le premier consiste à freiner le moteur en marche et à relever la puissance et le couple. Quant
au deuxième, il est basé sur l’étude de l’accélération du moteur, via ce qu’on appelle un volant
d’inertie. Nous avons la chance d’avoir un banc moteur à frein à poudre, muni également d’un volant
d’inertie. Nous allons donc étudier tout cela en même temps.
Une chose importante à connaître est la manière dont nous allons procéder pour déterminer
toute information relative aux caractéristiques du moteur comme la vitesse de rotation. En fait, des
capteurs sont disposés en des points clef du banc moteur, et permettent de lire, à l’aide de systèmes
d’acquisition par ordinateur (utilisation du logiciel LabVIEW), les données relatives au moteur.
Afin de reprendre le projet en main, nous allons réaliser un état de l’art du matériel permettant
d’étudier notre banc moteur. Nous commencerons donc par présenter le principe général des différents
moteurs. Puis une étude sur le frein sera réalisée. Nous nous focaliserons ensuite sur les étages de
puissance ainsi que sur les capteurs de vitesse et de couple. Finalement, nous étudierons LabVIEW et
la carte d’acquisition indispensable pour connaître les particularités de notre moteur.

2
A. Les Moteurs :
Un moteur électrique est un dispositif électromécanique permettant la conversion d'énergie
électrique en travail mécanique. Différents types de moteurs existent se différenciant par leurs
domaines d’utilisation en terme de puissance et de vitesse, mais aussi par leur prix, leur
encombrement, la précision du pilotage, etc.
1) Moteur asynchrone triphasé :
a) Description du moteur :
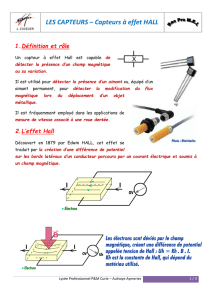
Il est constitué principalement :
du stator, partie fixe qui contient le bobinage et qui est
relié au réseau triphasé ;
du rotor, partie mobile directement monté sur l’arbre du
moteur.
b) Principe de fonctionnement :
Le stator (partie fixe) est constitué de trois bobines à 120° l’une de l’autre qui sont alimentées
en courant triphasé.

3
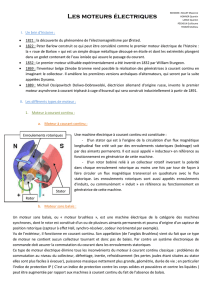
La circulation du courant dans la bobine crée un champ magnétique au centre de celle-ci de
direction l’axe de la bobine et de sens suivant la règle de la main droite :
Comme les courants traversant les trois bobines sont en alternatif et sont déphasés de 2π/3,
chaque bobine produit sur son axe une induction d'amplitude :
B1 = Bm cos wt
B2 = Bm cos(wt-2pi /3)
B3 = Bm cos(wt+2pi /3)
où B1, B2 et B3 sont les amplitudes des champs magnétiques
aux centres des bobines et w est la fréquence du courant.
Après calcul, Brx=B1x+B2x+B3x = (3Bm/2) sin(wt), et Bry=B1y+B2y+B3y = (3Bm/2).cos(wt).
où Br est le champ résultant.
On voit donc qu’un champ tournant est généré et que sa vitesse est proportionnelle à la fréquence du
courant. La vitesse de ce champ tournant est appelée vitesse de synchronisme.
On a donc : Ωs = w/p
avec Ωs : vitesse du champ tournant (rad/s), ω : pulsation des courants d’alimentation (rad/s) et p :
nombre de paires de pôles du champ tournant (sur l’exemple étudié ci-dessus p=1, c’est pourquoi on
trouve que Ωs=w).
Le rotor est constitué de conducteurs en court-circuit. L'enroulement au rotor est donc soumis
à des variations de flux du champ magnétique précédent. Une force électromotrice induite apparaît (loi

4
de Faraday : ) qui crée des courants rotoriques. Ces courants sont responsables de
l'apparition d'un couple qui tend à mettre le rotor en mouvement afin de s'opposer à la variation de flux
(forces de Laplace ). Le rotor tourne donc dans le même sens que le champ statorique. Il
n’atteint jamais la vitesse du champ rotorique. En effet, si tel était le cas, il n’y aurait plus de variation
de flux dans l’enroulement du rotor et donc plus de force de Laplace. Le moteur ne serait donc plus
entrainé. C’est pourquoi ce moteur est qualifié d’asynchrone.
La vitesse de rotation de ce moteur est de : n = ns.(1- g) où ns= Ωs/(2.π) : vitesse de
synchronisme en tr/s et g est le glissement (différence de vitesse entre la vitesse de synchronisme et la
vitesse du rotor en % de la vitesse de synchronisme).
Les domaines de fonctionnement de la Machine asynchrone :

5
c) Caractéristiques :
Une charge oppose au moteur un couple résistant Cr. Pour que le moteur puisse entraîner cette
charge, le moteur doit fournir un couple utile Cu de telle sorte que Cu=Cr. Lorsque les courbes
représentant le couple de la charge et du moteur en fonction de la fréquence de rotation se croisent, on
a donc atteint le point de fonctionnement :
La puissance consommée par un moteur triphasé est P = UI cosφ. Il est à noter que lors du
démarrage le moteur demande une très grande intensité (4 à 8 fois le courant nominal de la machine).
Il ne faut donc pas rester longtemps dans cette zone et si possible démarrer sous tension réduite.
Le glissement est toujours faible, de l'ordre de quelques pour cent (environ 2 à 3 %). Il faut
toujours avoir un glissement le plus faible possible car les pertes par effet joule dans le rotor sont
proportionnelles à ce glissement.
Les avantages de ce type de moteur sont :
La machine asynchrone est simple à réaliser, robuste et peu onéreuse.
Son couple de démarrage est élevé.
Il est parfaitement adapté aux entraînements à vitesse fixe.
Il accepte des variations de vitesse dans des rapports 1 à 10.
Les inconvénients sont :
Il fonctionne de piètre qualité à basse vitesse.
On ne peut pas contrôler son couple en variation de vitesse classique.
Son inertie est plus élevée que celle du moteur synchrone.
Grâce à l’avènement de l’électronique de puissance et à l’amélioration des moyens de contrôle
et de pilotage, le champ d’application de ce type de moteur s’est élargi et il se substitue au courant
continu dans le domaine des moyennes puissances.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%