PORTIQUE A CONTENEUR

Electrotechnique
STI GE
Lycée RENAUDEAU
PAGE : 8
2 – 1 Etude globale d’un système
2- SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
PORTIQUE A CONTENEURS

Electrotechnique
STI GE
Lycée RENAUDEAU
PAGE : 9
2 – 1 Etude globale d’un système
2- SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
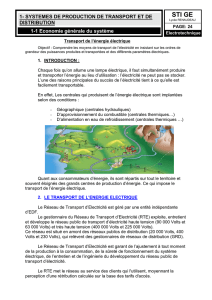
Portique à conteneurs
Le Terminal à conteneurs Sud est
prévu pour une capacité de
manutention annuelle de 150 000
conteneurs.
Dans la première phase du
développement, la société Mague a
fourni un portique de déchargement
ship-to-shore, dont l’automatisation
à été confiée à Télémécanique.
L’association d’automates TSX à
des variateurs de vitesse Rectivar
et Statovar permet le contrôle des
différents mouvements ainsi que
l’obtention de cadences élevées,
dans des conditions de sécurité très
importantes. Un logiciel spécifique
Codetel fournit des informations
multiples sur l’état de l’engin et
facilite son exploitation et sa
maintenance.
Le portique
Il s’agit d’un portique
spécialement conçu pour la
manutention de conteneurs ou
de colis lourds.
Il est constitué
de 2 palées supportant
l’ensemble de l’engin
d’une charpente centrale
supportant une flèche horizontale
de 70 m en deux parties :
l’arrière-bec et l’avant-bec, cette
dernière se relève pour
permettre l’accostage des
navires en toute sécurité.
D’un chariot auto-moteur
porte-poulies de levage de la
charge
d’un spreader 20’ 30’ 40’
inclinable permettant le
positionnement précis du
conteneur.
Caractéristiques :
Alimentation moyenne-tension
Alimentation réseau secours
Capacité de levage utile sous
spreader : 35 T
Portée avant : 32 m
Portée arrière : 16 m
Vitesse de levage en charge :
45 m/mn
Vitesse du chariot : 120 m/mn
Translation du portique : 45
m/mn
Cadence : 25 conteneurs/heure

Electrotechnique
STI GE
Lycée RENAUDEAU
PAGE : 10
2 – 1 Etude globale d’un système
2- SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
Portique à conteneurs
Le problème
L’immobilisation d’un navire au terminal
doit être la plus courte possible.
Il est donc nécessaire d’assurer le
déchargement dans les meilleurs
conditions d’efficacité. Il faut :
Travailler aux vitesses maximales en
diminuant les à-coups et les balancements
Un positionnement précis du spreader
au-dessus des cales et des zones de parc
Maintenir la disponibilité de l’engin
Faciliter l’exploitation et la maintenance
du système.
La solution
La précision et la large gamme de vitesses
demandées ont conduit à l’adoption de
moteurs continus pour le levage, et pour la
direction du chariot. Ces mouvements sont
contrôlés avec une grande souplesse et
une parfaite sécurité de fonctionnement
par des variateurs de vitesse Rectivar.
Les arbres moteurs du levage, à deux
treuils indépendants, sont liés par un
embrayage électro-magnétique et peuvent
être désolidarisés à volonté, permettant
ainsi l’inclinaison du spreader ou la marche
secours sur un des deux moteurs
seulement. Les moteurs asynchrones de la
translation sont, quant à aux, pilotés par un
variateur de vitesse Statovar ou peuvent
être alimentés conventionnellement en
marche secours. La disponibilité générale
de l’engin est par ailleurs renforcée par le
doublement des modules de contrôle de
tous les variateurs. 3 automates
programmables TSX série 7
communiquent entre eux à travers un
réseau Telway 7 et traitent au niveau 1 le
contrôle commande séquentiel de chaque
mouvement.
Des informations précises en
temps réel
Un logiciel spécialisé Codetel implanté
dans un quatrième automate TSX, de
niveau supérieur, assure la gestion de
messages spécifiques et leur visualisation
sur un écran placé en salle d’appareillage
électrique. Selon les nécessités, les pages
écran, à accès hiérarchisé, donnent des
informations de conduite, la signalisation
d’alarmes ou des messages de
dysfonctionnement avec identification en
clair des organes concernés.
Vue générale
Salle d’appareillage
et écran plasma
Codetel

Electrotechnique
STI GE
Lycée RENAUDEAU
PAGE : 11
2 – 1 Etude globale d’un système
2- SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
Portique à conteneurs
Grue portuaire de Saint Nazaire.
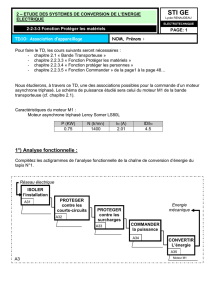
Le système sur lequel vous allez travailler est une maquette simulant une grue portuaire
installée sur le port de Saint Nazaire. Elle effectue le chargement et le déchargement de bateaux
porte-conteneurs. Voir site Internet :http://www.nantes.port.fr et http://classes.belem.44.free.fr/belapp/A_Alim/presentation.html.
Caractéristiques électriques :
Alimentation : Transformateur 5500 V / 400 V ; 800 kVA ; Icc = 25 kA.
Levage : Machine à courant continu 317 kW ; 1048 tr/mn (max 2000 tr/mn) ; 851 A + Variateur.
Relevage : Moteur asynchrone à rotor bobiné 74 kW / 400 V ; 1500 tr/mn Istator : 142 A ; Irotor : 128 A.
Translation : Moteur asynchrone à rotor bobiné 8 x 22 kW : 1500 tr/mn ; Is : 83 A ; Ir 63 A ; Ur = 290 V.
Direction : Moteur asynchrone à rotor bobiné 2 x 30 kW : 1500 tr/mn ; Is : 69 A ; Ir 63 A ; Ur = 320 V.

Electrotechnique
STI GE
Lycée RENAUDEAU
PAGE : 12
2 – 1 Etude globale d’un système
2- SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE
ELECTRIQUE
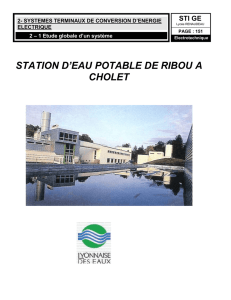
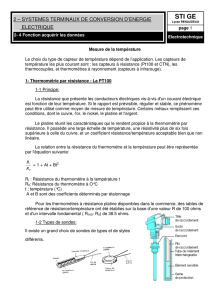
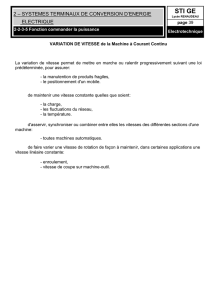
Le système étudié dans l’atelier ELECTROTECHNIQUE
Le système réel a servi de support d’étude pour la réalisation du système similaire du lycée
concernant uniquement le mouvement de levage.
Le système didactique permet le déplacement de la charge suivant un axe vertical.
La motorisation de ce système est réalisée par un ensemble moto-variateur à courant
continu et d'un réducteur à chaîne.
La détection des positions extrêmes de la charge est assurée par des capteurs de fin de
course de levage (sécurité contre les dépassements de positions).
Câble
d = 6 mm
Pignon 9
dents
Moteur à courant continu
puissance 2,6 kW Tension d’induit 400V
Dynamo
tachymètrique
Hauteur : 5,5 m
Course : 3,6 m
Poulie de renvoi
Charge de masse m
= 100 kg maxi
Frein treuil
Diamètre du treuil :114.6 mm
Circonférence du treuil :360 mm
Rendement :
= 0,9
Frein moteur
Treuil avec
plateau 54
dents pour
chaîne
Chaîne
pas = 25,40
Codeur incrémental :
250 points
Vitesse nominale de
la charge : 1,5 m/s
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%