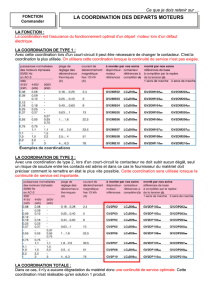
Choix de la protection thermique

P 1 / 36 Electricité industrielle
ELEMENTS
D'ELECTRICITE ET
D'AUTOMATISMES INDUSTRIELS

P 2 / 36 Electricité industrielle
Le présent document présente un sommaire des principaux éléments rencontrés
dans les installations électriques industrielles.
LES FONCTIONS DE BASE DES DEPARTS MOTEURS
Un départ moteur comprend les fonctions de base suivantes :
Le sectionnement
La protection contre les courts-circuits
La protection contre les surcharges
La commutation
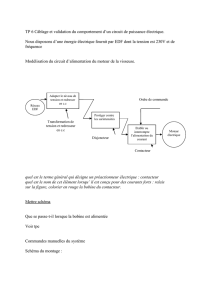
Le sectionnement
Cette fonction à pour but d’isoler, en totalité ou en partie, les circuits de leur source
d’énergie (circuit de puissance) afin de pouvoir intervenir sur les installations en toute
sécurité. Cette fonction est assurée par des sectionneurs. Elle peut être intégrée
dans des appareillages multifonctions tels les interrupteurs sectionneurs, les
disjoncteurs.
La protection contre les courts-circuits
Alors qu’au démarrage, un moteur standard absorbe de 6 à 8 fois son courant
nominal, un courant supérieur de 10 à 13 fois le courant nominal, est un courant de
défaut assimilé à un court-circuit.
La fonction de protection contre les courts-circuits est assurée par des fusibles ou
des disjoncteurs.
La protection contre les surcharges
Les surcharges mécaniques et les défauts des réseaux d’alimentation sont les
causes les plus fréquentes de la surcharge supportée par les moteurs. Ils provoquent
une augmentation importante du courant absorbé par les moteurs, qui conduit à un
échauffement excessif du moteur, réduisant fortement sa durée de vie, et pouvant
aller jusqu’à sa destruction.
La fonction de protection contre les surcharges est assurée par des relais de
protection thermique, des relais électroniques multi fonctions ou des disjoncteurs
magnéto-thermiques moteurs. Elle est intégrée dans les démarreurs ralentisseurs et
les variateurs de vitesse électroniques.
Une protection complémentaire peut être réalisée par des relais de protection à
sondes ou des relais multifonctions associés à des thermistances PTC intégrées
dans les enroulements du moteur.
Les causes possibles de défaillance des moteurs électriques sont variées. L'une des
plus fréquentes, qui est souvent accidentelle, est l'utilisation des moteurs au-delà des
limites fixées par les constructeurs ou dans des conditions d'ambiances anormales.
Une étude statistique réalisée en Angleterre et portant sur 9000 cas de défaillance a
donné les résultats suivants :

P 3 / 36 Electricité industrielle
Surcharges 30 %
Polluants (exemple : atmosphère corrosive) 19 %
Absence de phase 14 %
Défaillance de paliers 13 %
Vieillissement (exemple : température ambiante trop élevée) 10 %
Défauts rotor 5 %
Divers 9 %
Ces défaillances concernent des moteurs de puissance supérieure ou égale à 37
kW.
L'examen de ces résultats montre que dans plus de 50 % des cas, les incidents sont
dus à des effets thermiques.
Abstraction faite du remplacement éventuel des pièces d'usure telles que
roulements, bagues, balais, etc.., la durée de vie d'une machine électrique tournante
est liée à celle de ses isolants. Pour autant que l'échauffement limite ne soit pas
dépassé, l'espérance de vie des matériaux isolants est très élevée. Elle diminue
approximativement de moitié pour une augmentation de 10 °C.
La commutation
Son rôle est d’établir et de couper le circuit d’alimentation du moteur. Cette fonction
est assurée par des contacteurs électromagnétiques.
LES COMPOSANTS ELECTROMECANIQUES
Le sectionneur porte fusible

P 4 / 36 Electricité industrielle
Sectionneur avec dispositif contre la marche en monophasé
Le sectionneur permet de réaliser deux fonctions fondamentales :
Il assure l'isolement du circuit aval grâce à une coupure visible et une distance
d'ouverture largement dimensionnée;
Il supporte les cartouches fusibles destinées à protéger l'installation contre des
courts-circuits.
Le choix du sectionneur ne pourra être fait qu'après avoir préalablement défini la
cartouche fusible qui conviendra le mieux au circuit que l'on désire protéger.
Choix des cartouches fusibles (type, calibre, taille)
Vous désirez protéger un moteur ou protéger un transformateur :
Vous choisissez des cartouches fusibles type aM. Elles sont conçues pour
résister à de fortes surcharges de très courte durée. Elles seront
obligatoirement associées à un relais thermique accouplé à un contacteur.
Vous désirez protéger un circuit d'éclairage, protéger une ligne d'alimentation,
protéger un four :
Vous choisissez des cartouches fusibles type gl dont l'usage est plus général
mais qui ont un pouvoir de limitation plus faible que les cartouches fusibles
aM.
Il est recommandé de toujours insérer le contact auxiliaire de pré coupure du
sectionneur dans le circuit de la bobine du contacteur avec lequel il est en série.

P 5 / 36 Electricité industrielle
S'il n'est pas associé à un contacteur, il est obligatoire de s'assurer que le
sectionneur sera manœuvré à vide.
Le contacteur
Schéma de contacteur inverseur
Bobine de contacteur
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%