XI) Autopilotage de la machine synchrone - Physique Appliquée

Machine synchrone
Machine synchrone ........................................................................................................................................................................................................... 1
I) Principes des transmissions mécaniques synchrones (transmission de couple) ................................................................................... 3
I.1) Transmissions par engrenages ou par courroies ................................................................................................................................... 3
I.2) Transmission magnétique par aimants (champ d'excitation magnétique H) ................................................................................ 3
I.3) Principe de la machine synchrone .............................................................................................................................................................. 3
II) Symbole ................................................................................................................................................................................................................... 3
III) Constitution ......................................................................................................................................................................................................... 4
III.1) Stator ............................................................................................................................................................................................................ 4
III.2) Rotor .............................................................................................................................................................................................................. 4
III.2.1) A aimant permanent .......................................................................................................................................................................... 4
III.2.2) Rotor bobiné........................................................................................................................................................................................ 4
IV) Principe de fonctionnement : ........................................................................................................................................................................... 5
IV.1) Excitation des machines synchrones : ................................................................................................................................................... 5
IV.2) Fem induite : ................................................................................................................................................................................................. 5
IV.2.1) Fem théorique dans un enroulement : ............................................................................................................................................ 5
IV.2.2) Facteur de bobinage (ou d’enroulement) : ................................................................................................................................... 5
IV.2.3) Facteur de forme Kf : ........................................................................................................................................................................ 5
IV.2.4) Coefficient de Kapp : ......................................................................................................................................................................... 5
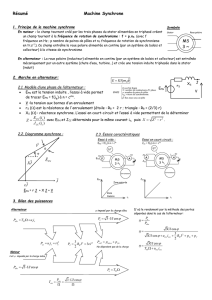
V) Modèle équivalent de la machine :..................................................................................................................................................................... 6
V.1) Modèle équivalent de Behn Eschenburg pour un enroulement d’alternateur: .............................................................................. 6
V.2) Diagramme de Potier: ................................................................................................................................................................................... 7
V.3) Détermination des éléments du modèle : ............................................................................................................................................... 7
V.3.1) Etude à vide : détermination de EPN ................................................................................................................................................. 7
V.3.2) Etude en court-circuit ....................................................................................................................................................................... 8
V.3.3) Détermination de r .............................................................................................................................................................................. 8
V.3.4) Détermination de X ............................................................................................................................................................................. 8
VI) Bilan de puissance: ............................................................................................................................................................................................... 8
VII) Réversibilité : ..................................................................................................................................................................................................... 9
VII.1) Fonctionnement en alternateur :........................................................................................................................................................... 9
VII.2) Fonctionnement en moteur : .................................................................................................................................................................. 9
VIII) Fonctionnement en alternateur. ................................................................................................................................................................. 9
VIII.1) Modèle équivalent et diagramme simplifié : .................................................................................................................................... 9
VIII.2) Réaction magnétique d’induit : .......................................................................................................................................................... 10
VIII.3) Caractéristiques de l’alternateur : .................................................................................................................................................. 10
VIII.3.1) Plaque signalétique: ....................................................................................................................................................................... 10
VIII.3.2) Caractéristiques à vide EV = f(iexc) et en court circuit JCC = f(iexc): ............................................................................ 10
VIII.3.3) Caractéristiques en charge : V=f(J) avec n et iexc constants ........................................................................................ 11
VIII.3.4) Caractéristiques de réglage : iexc=f(J) à f=fn, V=VN et cos constants .................................................................. 11
VIII.3.5) Caractéristiques en charge : V=f(iexc) à f=fN, I=cte et =cte. ................................................................................... 12
VIII.3.6) Courbe de Mordey :J=f(iexc) ) à f=fN, Pu=cte et V=VN. .................................................................................................. 12
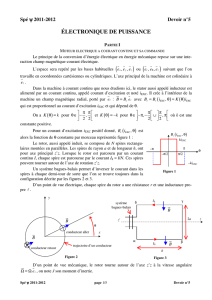
IX) Fonctionnement en moteur synchrone : ...................................................................................................................................................... 12
IX.1) Schéma équivalent ..................................................................................................................................................................................... 12
IX.2) Expression du couple ................................................................................................................................................................................ 13
IX.3) Fonctionnement à excitation constante : .......................................................................................................................................... 13
IX.4) Caractéristique mécanique Cm=f(n). n=ns=cte. ............................................................................................................................... 13
IX.5) Propriétés du moteur synchrone : ........................................................................................................................................................ 13
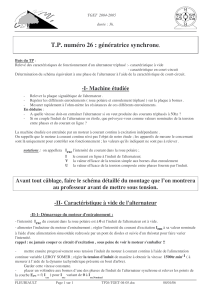
X) Bilan sur les fonctionnements d’une machine synchrone sur un réseau : V=cte, f=cte. ................................................................. 14
X.1) Couplage des machines synchrones sur le réseau : ............................................................................................................................ 14
X.1.1) Conditions de couplage : ..................................................................................................................................................................... 14
X.2) Schéma récapitulatif.................................................................................................................................................................................. 14
X.3) Explications. .................................................................................................................................................................................................. 16
X.3.1) Fonctionnement à vide : (pertes négligées). ................................................................................................................................ 16
X.3.2) En charge, rotor accéléré: Génératrice ....................................................................................................................................... 17
X.3.3) En charge, rotor ralenti: ................................................................................................................................................................... 17
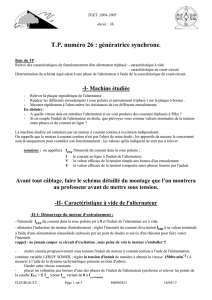
XI) Autopilotage de la machine synchrone : ..................................................................................................................................................... 18
XI.1) Autopilotage de la machine synchrone : .............................................................................................................................................. 18

XI.2) Moteur Brushless et autopilotage avec capteur à effet Hall ou sans : ................................................................................... 19
XII) Bibliographie : .................................................................................................................................................................................................. 19

I) Principes des transmissions mécaniques synchrones (transmission de couple)
I.1) Transmissions par engrenages ou par courroies
Explorons les transmissions synchrones les plus abordables
Si r1 = r2, les 2 axes tournent en synchronisme. La transmission du couple est indépendante de la charge, et le
couple moteur est intégralement transmis à celle-ci : C1(moteur) = C2(résistant).
I.2) Transmission magnétique par aimants (champ d'excitation magnétique H)
On a toujours : C1(moteur) = C2(résistant).). Mais :
a) Le couple qu'il est possible de transmettre est limité.
b) À vide = 0. Mais en charge l'angle séparant les deux aimants augmente avec le couple résistant. On montre
que le couple transmissible vaut :
12
sinC k H H
- à vide (couple résistant nul), = 0
- augmente avec la charge
- C est maximum pour = /2
- au-delà, il diminue.
c) Conséquences :
- au démarrage, si la vitesse de rotation n1 augmente brusquement, il est probable que l'inertie de la charge
empêche une variation instantanée de n1 = 0 à n1 = n2. L'angle variant alors de 0 à 2, la valeur moyenne
de sin est nulle, il n'y a pas de couple transmis. Le système ne démarre pas.
- en marche, si le couple résistant augmente, peut dépasser la valeur de /2. Le système devient instable,
car le couple transmis diminue alors que la charge augmente. La transmission s'interrompt rapidement. On
dit qu'elle "décroche".
I.3) Principe de la machine synchrone
C’est un convertisseur d’énergie mécanique en énergie électrique (alternateur) ou inversement (moteur
synchrone) qui effectue une transmission magnétique synchrone, avec ses limitations...
Le champ magnétique entrainant le rotor équivalent à un aimant est créé par des bobinages créant un
champ magnétique tournant dans l’entrefer à une vitesse
Sf
np
nS : vitesse du champ tournant en tr/s
f : fréquence de la tension d’alimentation en Hz
p : nombre de paires de pôles
II) Symbole
Symbolisation d'une machine synchrone triphasée :

MS
~
MS
3~
Induit
Inducteur
Machine
monophasée
Machine
Triphasée
MS
~
MS
3~
~
~
~
1
2
3
~
1
2
3
III) Constitution
III.1) Stator
Le stator est un bobinage polyphasé (en général branché en Y), qui engendre un champ tournant.
Il est pourvu d’encoches dans lesquelles sont distribués les conducteurs d’un bobinage triphasé (fer mieux
utilisé et fonctionnement plus souple).
Le stator est feuilleté pour diminuer les pertes magnétiques.
III.2) Rotor
III.2.1) A aimant permanent
Pour les petites puissances (usuellement < 10 kW), le rotor est à aimants permanents. N'ayant ni collecteur ni
balais, le moteur est appelé "brushless".
III.2.2) Rotor bobiné
Pour des puissances plus importantes, le rotor est bobiné. Son alimentation en courant continu (connexions du +
et du –) peut être assurée par un collecteur à deux bagues (beaucoup plus simple que celui d'une MCC). Il est
aussi possible d'associer sur le même arbre une deuxième MS fonctionnant en alternateur, à aimants
permanents, de puissance inférieure, débitant dans un pont redresseur tournant qui alimente le rotor de la
machine principale. Il n'y a alors ni bagues, ni balais.
-Pôles saillants : pièces polaires rapportées sur une culasse,
autour desquelles sont bobinés les enroulements d’excitation.
Vitesse de rotation plus faible et grand nombre de pôles.
(f=pn). Ces alternateurs sont généralement associés à des
turbines hydrauliques. (Faibles ou moyennes puissances, coût plus
faible) ; l'entrefer n'est pas constant d'où une modélisation
difficile.
S
N
-Pôles lisses : L’enroulement d’excitation est placé dans des
encoches. Entrefer constant. Ces machines sont robustes et
supportent de grandes vitesses de rotation. Machines de
fortes puissances (50000 kVA) : turboalternateurs
(alternateur + turbine à vapeur).
N
S
ie
N
S
Pas polaire
N
N
S

IV) Principe de fonctionnement :
IV.1) Excitation des machines synchrones :
L’inducteur est alimenté par un courant continu. C’est un électroaimant. Son rôle est de créer un champ
magnétique. Ce champ magnétique est un champ tournant car le rotor tourne.
-On peut utiliser une source extérieure (balais + bagues).
-Utilisation d’une génératrice à courant continu montée en bout d’arbre. Le réglage du courant se fait par le
réglage du courant inducteur de la génératrice.
-Utilisation d’une excitation statique. Pas de collecteur, pas d’étincelles...
Excitation statique.
N
S
GS
3~
GS
3~
Alternateur
auxiliaire
Redresseur
Induit principal
(sur le stator)
Alternateur
principal°
Inducteur
ie
ROTOR
Aimants fixes (inducteur)
Induit
Fig. 1
3
N
N
N
S
S
S
Alternateur
principal
Alternateur
intermédiaire
Alternateur
d’excitation
IV.2) Fem induite :
IV.2.1) Fem théorique dans un enroulement :
Le champ inducteur est supposé à répartition sinusoïdale donc le flux
ˆ
( ) costt
, avec = 2 f = 2 p nS = p
Or la fém induite dans une spire est
1d
edt
d'où
1ˆsinet
et comme = p alors
1ˆsine p t
La valeur efficace E1 de e1(t) est donc
1
ˆ
2
p
E
et comme =2 nS
1
4,44
2ˆ
2S
E pn
Si le nombre de conducteurs par enroulement est N, le nombre de spires est N/2. , d'où la valeur efficace de la fém
théorique
14,44 ˆˆ
2,22
22
th S
f
N
E E N pn Nf
IV.2.2) Facteur de bobinage (ou d’enroulement) :
La fem pratique est légèrement différente de la fem théorique.
Elle est multipliée (entre autres) par un facteur Kb qui prend en compte la façon dont est réellement réalisé un
enroulement. (plusieurs encoches utilisées …) Kb=KdKrKi < 1
IV.2.3) Facteur de forme Kf :
Le champ magnétique dans l’entrefer n’est pas sinusoïdal.
Facteur correctif Kf . Kf >1
IV.2.4) Coefficient de Kapp :
La fem induite par un champ tournant à la vitesse S a une
pulsation = pS et est égale à :
ˆ
2,22
bf
E K K Nf
K
ˆˆ
S
E KNf KNpn
E : f.é.m. induit (V)
K : coefficient de Kapp
N : nombre de conducteurs d’une phase de la
machine (1 spire = 2 conducteurs)
ˆ
: flux maximum à travers un enroulement (Wb)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%