Consignes aux auteurs

Revue. Volume X – n° x/année, pages 1 à X
La méthode multi-échelle et multi-modèle
pour la simulation du crash
Stefanos VLACHOUTSIS* et Lars GREVE**
*ESI Group, 99 rue des Solets, Silic 112, 94513 Rungis Cedex, France
**Volkswagen Group, R&D, Letter box 1777, 38436 Wolfsburg, Germany
Courriel pour toute correspondance : Stefanos.Vlachoutsis@esi-group.com
RÉSUMÉ. Une nouvelle méthode de simulation numérique du crash en utilisant un code
explicite en temps est présentée dans laquelle deux modèles distincts de type éléments finis
interagissent pour le calcul de la solution de la structure constituée par l’union de deux
modèles. L’interaction entre les deux modèles se traduit par l’échange des forces aux nœuds
de la frontière commune, la gestion du contact inter-modèles et l’utilisation des pas de temps
différents pour chaque modèle. La méthode multi-échelle – multi-modèle a été mise en œuvre
pour un code d’éléments finis de type explicite (PAM-CRASH). Les tests industriels ont
montré l’efficacité de la méthode qui a permis de diviser le temps total de calcul par cinq. La
méthode peut être étendue dans le cas d’un couplage de type multi-physique : fluide-structure
ou fluide-structure-thermique.
ABSTRACT. A new method of crash numerical simulation using an explicit in time code is
presented in which two distinct finite element models, each of them in its own distributed
memory process, interact for the solution of the whole structure. The interaction consists in
the force exchange at the matching grid nodes, in the inter-model contact and in the sub-
cycling technique i.e. the use of different time steps for each model. The multi-scale and
multi-model method was implemented for an explicit finite element code (PAM-CRASH). The
industrial test cases confirm the efficiency of the method by dividing the total computing time
by a factor of five. This method can be extended for other multi-physics couplings like fluid-
structure or fluid-structure-thermal interaction.
MOTS-CLÉS : Crash, code explicite, sous-cyclage, couplage, DMP, MPI, PAM-CRASH.
KEYWORDS: Crash, explicit code, sub-cycling, coupling, DMP, MPI, PAM-CRASH.

2 Revue. Volume X – n° x/année
1. Introduction
Les codes explicites de simulation du crash sont des outils essentiels pour concevoir
un produit de l’industrie automobile. Il a été prouvé que les éléments finis de type
coques sont particulièrement adaptés pour le calcul de la déformation plastique des
tôles métalliques en flexion ou en flambement, sachant que le risque de rupture pour
ces composants là est moins élevé que celui des pièces de fonderie auxquelles on
s’intéresse aujourd’hui. Un exemple d’une telle pièce est le cadre moteur : sa rupture
peut modifier considérablement la répartition des charges de la structure. Aussi le
calcul du crash doit être suffisamment précis pour prévoir la rupture. Ceci nécessite
l’utilisation d’un maillage fin constitué d’ éléments finis de type solide. Pour un code
explicite la stabilité du calcul est assuré par un pas de temps qui dépend d’une
longueur caractéristique, lc et de la vitesse de propagation des ondes dans le milieu
c0 ,
0
/clt c
[1.1]
La vitesse des ondes pour les éléments de type coques et solides sont (réf.1) :
211 1
;,0,0
EcEc solidshell
[1.2]
ou E est le module d’élasticité, ν est le coefficient de Poisson et ρ est la masses
volumique. Le pas de temps est limité par le raffinement du maillage nécessaire à la
précision des résultats. Certaines méthodes artificielles comme l’augmentation de la
masse volumique ou la diminution du module d’élasticité ne peuvent avoir qu’une
application limitée puisque les propriétés physiques du matériau sont modifiées.
Nous utilisons une technique de sous-cyclage pour éviter les difficultés liées aux
limitations du pas de temps. La technique est basée sur la division du modèle
éléments finis en deux parties. La première partie est appelée « modèle local » (il
représente une pièce de fonderie par exemple un cadre moteur) et la seconde partie
« modèle global » (il schématise la voiture sans le cadre moteur). Le modèle local est
constitué d’un maillage fin alors que le modèle global est constitué d’un maillage
plus grossier. Ainsi chaque modèle a son propre pas de temps, celui du modèle local
étant plus petit que celui du modèle global. Le principe du sous-cyclage a déjà été
prouvé par plusieurs auteurs, voir les références 2 à 5 et plus récemment les
références 6 à 8. Pour le présent travail le sous-cyclage est appliqué à deux modèles
séparés chacun calculé par un exécutable de type « mémoire distribuée » appelée
dans la suite type DMP (Distributed Memory Processing). Le rapport des pas de
temps (entier) – pas de temps du modèle global sur celui du modèle local est :
LG
tttR
/
[1.3]
Le modèle local est souvent composé d’ éléments de même type – par exemple des
solides – tandis que le modèle global est composé de différents types d’éléments. Un

Multi-échelle & multi-modèle pour le crash 3
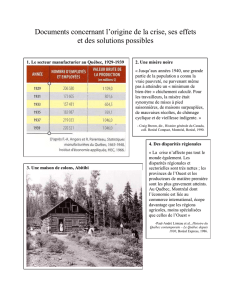
exemple typique est illustré sur la figure 1 avec les données principales du cas test.
Figure 1. Modèles global et local et principe du couplage multi-échelle – multi-
modèle de deux exécutables de type DMP.
Ce test industriel a été utilisé dans la suite pour la validation de la méthode multi-
échelle – multi-modèle.
2. La technique multi-échelle
2.1. L’interface des nœuds coïncidents (‘matching grid nodes’)
L’interface des nœuds coïncidents est constituée des paires de nœuds : un nœud
du modèle global (ng) correspond à un nœud du modèle local (nl) si la distance entre
ces nœuds est inférieure à une valeur limite donnée par l’utilisateur (tolérance des
distances) Normalement les nœuds doivent occuper la même position dans l’espace.
Couplage inter-code:
Nœuds communs
Contact inter-code
Proc. 1
Proc. 2
Proc.
3
Proc. n
Modèle global (véhicule):
Modèle éléments finis (hétérogène
– coques, poutres etc.)
tG = 1s, NEleG = 879000
Domaine intra-code DMP
Proc. 1
Proc. 2
Proc. 3
Proc. n
Modèle local (cadre):
Modèle éléments finis solides
(homogène – tétraèdres)
tL = 0.1s, NEleL = 65000
Domaine intra-code DMP
tG
tL
Temps
Sous-cyclage
Cycle
partagé

4 Revue. Volume X – n° x/année
Une paire de nœuds coïncidents est liée par un ressort dont la rigidité dépend des
masses nodales et du pas de temps.
2.2. Le contact inter-codes
Le contact entre les deux modèles est du type segment-contre-segment décrit dans la
documentation de PAM-CRASH (réf. 10). L’algorithme couramment utilisé par le
code PAM-CRASH se base sur la calcul d’une force de rappel proportionnelle à la
pénétration des nœuds en présence à la surface de contact.
3. Analyse de l’efficacité du calcul
3.1. Spécifications du réseau
Deux systèmes ont été utilisés pour le calcul du cas test. Les caractéristiques sont
résumées dans le tableau 1.
Interconnexion standard
(Std-Net)
Interconnexion hautes performances
(HP-Net)
Système
NEC HPC Linux Cluster
IBM 1350/x335 Linux Cluster
Processeur
AMD Opteron 246 (2.0 GHz)
Intel P4 Xeon (3.06 GHz)
Taille
120 processors; 2 proc./host
120 processors; 2 processors/host
Réseau
Gigabit Ethernet / LAM MPI
a) Gigabit Ethernet / LAM MPI
b) Myrinet 2000 / MPICH MPI
Débit
1GBit/s
2GBit/s
Tableau 1. Caractéristiques des systèmes de calcul pour l’interconnexion
standard et l’interconnexion hautes performances.
3.2. Résultats
L’efficacité de la méthode multi-échelle sont résumés dans les tableaux 2 et 3. Etant
donné un modèle éléments finis donné (figure 1), la méthode multi-échelle a permis
de diviser le temps de calcul par cinq pour tout en obtenant des résultats similaires à
ceux obtenus sans couplage (mono-modèle avec un pas de temps unique) (tableau 2).
D’un point de vue informatique on montre qu’ une connexion Myrinet est plus
efficace qu’ une connexion Ethernet Gigabit en un gagnant un facteur trois sur le
temps de calcul.

Multi-échelle & multi-modèle pour le crash 5
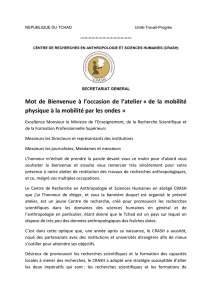
Figure 2. Modèle local : le modèle avec maillage fin est composé de 65000
éléments et le modèle très fin est composé de 520000 éléments.
Solution classique (Rt =1)
Solution multi-échelle (Rt = 10)
Temps [h]
113.5
22.5
Speedup [-]
-
5
Tableau 2. Comparaison du temps de calcul de la simulation d’un crash frontal
après 120ms en utilisant 20 processeurs sur le réseau Std-Net : approche
« classique » (pas de temps unique) comparée à la nouvelle approche du calcul
multi-échelle.
Ethernet
Myrinet
Temps de calcul estimé [h]
188
61.5
Speedup [-]
-
3
Tableau 3. Comparaison des interconnexions gigabit Ethernet et Myrinet pour le
calcul du modèle global et du modèle local maillé très finement : temps de calcul
estimé et accélération (« speedup ») pour un calcul de 120ms en utilisant 112
processeurs basé sur une durée courte de simulation de 1ms.
4. Conclusion
La méthode multi-échelle – multi-modèle a été appliquée à la simulation du crash
automobile avec succès. Les résultats obtenus sont conformes à ceux obtenus par une
Modèle local : maillage fin
Modèle local : maillage très fin
 6
6
1
/
6
100%