éolienne

Support : Eoliennes
« PRESENTATION
et
ANALYSE FONCTIONNELLE »
ACADEMIE DE NANCY-METZ
Baccalauréat STI Génie Electronique
Session 2008
Projet de Construction Electronique
DOSSIER D’ETUDE

Dossier élève
1
PRESENTATION
I. MISE EN SITUATION
I.1. Comment fonctionne une éolienne ?
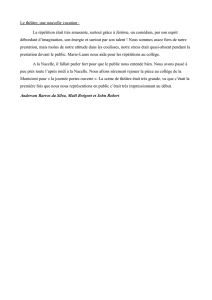
Une éolienne ou aérogénérateur est un capteur
de vent dont la force actionne les pales d'un
rotor. L'énergie mécanique produite par la
rotation des pales est transformée en énergie
électrique.
L'éolienne se compose d'un mât (de 10 à 100 m
de haut) sur lequel est installée une nacelle
renfermant la génératrice électrique qui est
entraînée par un rotor de 2 ou 3 pales mesurant
entre 5 et 80 m de diamètre. une éolienne de
forte puissance nécessitent de solides fondations.
Sa durée de vie est de 20 ans environ.
Elle fonctionne uniquement lorsque la vitesse du
vent est comprise entre 15 km/h et 90 Km/h
maximum, pour des raisons de sécurité. La
puissance d'une éolienne peut aller jusqu'à 5 MW
(A titre de comparaison, la puissance d’une
tranche de centrale nucléaire est de 1400 MW
environ). L'électricité produite est acheminée par
un câble électrique souterrain jusqu'au poste de
raccordement. Au pied de chaque éolienne, un
transformateur convertit la tension de 690 volts en 20000 volts, tension du réseau national d'Électricité de
France sur lequel toute l'électricité produite est acheminée.
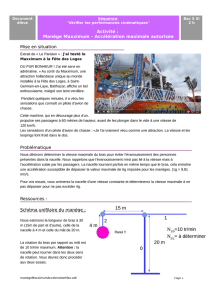
I.2. Régulation mécanique de la puissance d’une éolienne
Les objectifs de la régulation sont d’assurer la sécurité de l’éolienne par vents forts et de limiter la
puissance. Une turbine éolienne est dimensionnée pour développer sur son arbre une puissance
dénommée puissance nominale Pn. La puissance Pn est obtenue à partir d’une vitesse du vent vn,
dénommée vitesse nominale. Lorsque la vitesse du vent est supérieure à vn la turbine éolienne doit
modifier ses paramètres de sorte que sa vitesse de rotation reste pratiquement constante.
on spécifie aussi :
la vitesse de démarrage, vd, à partir de laquelle
l'éolienne commence à fournir de l'énergie,
La vitesse maximale du vent, vM, pour laquelle la
turbine ne convertit plus l'énergie éolienne, pour
des raisons de sécurité de fonctionnement.
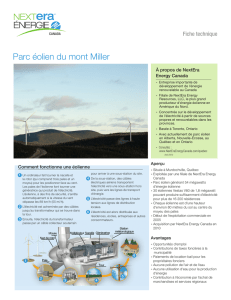
Les vitesses vn vd et vM définissent quatre zones sur
le diagramme de la puissance utile en fonction de
la vitesse du vent :
la zone I, où P = 0 (la turbine ne fonctionne pas),
la zone II, dans laquelle la puissance fournie sur l'arbre dépend de la vitesse du vent v,
la zone III, où la vitesse de rotation est maintenue constante et où la puissance P fournie reste égal à Pn,
La zone IV, dans laquelle le système de sécurité de fonctionnement arrête le transfert de l'énergie.

Dossier élève
2
I.3. Principes de contrôle de la puissance
Il existe deux principes de contrôle aérodynamique pour limiter la puissance extraite de la turbine à la
valeur de la puissance nominale de la génératrice :
système « pitch » ou « à pas variable »
Il permet d’ajuster la portance des pales à la vitesse du vent pour maintenir une puissance sensiblement
constante dans la zone III de vitesse. En pivotant la pale autour de son axe longitudinal, on prend
uniquement l’énergie hors du vent nécessaire (Les hélicoptères actuellement utilisent le même principe
pour contrôler leur position de vol). Cependant, le mécanisme de pas variable ajoute de la complexité
à l’éolienne car on a besoin d’une certaine quantité d’énergie pour faire tourner une pale moderne qui
pèse plusieurs tonnes. Les éoliennes modernes utilisent des contrôleurs électroniques.
système « stall » ou à « décrochage aérodynamique »
Il est plus robuste, car c’est la forme des pales qui conduit à une perte de portance au-delà d’une
certaine vitesse de vent, mais la courbe de puissance chute plus vite : il s’agit donc d’une solution
passive.
I.4. Caractéristiques des turbines
On classe les éoliennes suivant la disposition géométrique de
l'arbre sur lequel est montée l'hélice. Il existe principalement
deux types de turbines éoliennes :
- Turbines à axe horizontal (figure 1 a)
- Turbines à axe vertical (figure 1 b)
La plupart des éoliennes actuellement installées utilisent des
turbines à axe horizontal.
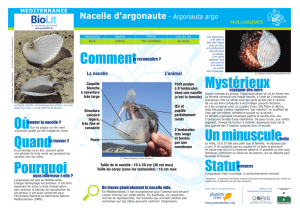
I.5. Puissance et Rendement
Il est très facile de mesurer les vitesses du vent –
normalement avec un anémomètre à coupelles
dont la vitesse de rotation est proportionnelle à la
vitesse du vent. Cependant déterminer la quantité
d’énergie éolienne utilisable est un peu plus
compliqué. Ceci parce que la puissance du vent est
proportionnel au cube de la vitesse du vent
(P~Vvent3).
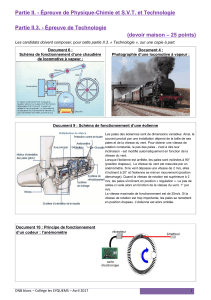
La ligne verte de la Figure ci-contre montre
exactement la fonction cubique, la puissance
théorique au vent. Mais naturellement on ne peut
pas utiliser toute cette puissance car on arrêterait
complètement les mouvements du vent, ce qui n’est
pas possible. La part utilisable de la vitesse du vent
est inférieure – en fait, elle est d’environ 60 % de la
puissance théorique (ligne rouge sur la Figure). Si
nous prenons en compte les pertes aérodynamiques
des pales, les pertes mécaniques du multiplicateur et
les pertes électriques du générateur etc., la
puissance délivrée au consommateur par l’éolienne
ressemblera à peu près à celle représentée par les lignes noires et bleues dans la figure ci-dessus. En
pratique, on raccorde actuellement en réseau (on transforme en énergie utilisable) à peu près 50 % de
la puissance théorique du vent. Ceci fait de la puissance éolienne un système énergétique très rentable
puisque les centrales thermiques ont des rendements avoisinant les 25 à 35 %, les centrales hydrauliques
approchent les 50 à 60 % et les centrales nucléaires seulement les 0,5 %.

Dossier élève
3
II. EOLIENNE A PAS VARIABLE
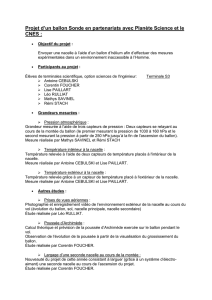
II.1. Diagramme sagittal
L1-capter l'énergie éolienne
L11-orienter les pales
L2-transformer la portance en couple
L12-s'intégrer au rotor
L7-s'intégrer à la nacelle
L3-transmettre l'énergie mécanique non adaptée
L13-s'intégrer à la nacelle
L4-transmettre l'énergie mécanique adaptée
L6-s’intégrer à la nacelle
L5-transmettre l'énergie électrique
L8-capter la vitesse du vent
L9-transmettre l'information au contrôleur
L10-commander le système d'orientation
L14-capter la direction du vent
L15-transmettre l'information au contrôleur
L16-commander le système d'orientation
L19-Permettre la rotation
L17-orienter la nacelle
L18-s'intégrer au mât
L20- se fixer au sol
Pales
moyeu
Multiplicateur
de
vitesse
génératrice
Système
orientation
Nacelle
anémomètre
girouette
Contrôleur
Système
orientation
mât
Réseau EDF
Sol
Vent
L1
L11
L2
L12
L3
L6
L4
L5
L17
L20
L18
L16
L15
L13
L9
L19
L10
L8
L14
L7
Limite
d’étude

Dossier élève
4
Rotor
Il transforme l’énergie du vent en énergie mécanique. Le rotor est un ensemble constitué des pales (d’un
nombre variable) et du moyeu.
Nacelle
Son rôle est d’abriter l’installation de génération de l’énergie électrique ainsi que ses périphériques. Elle
comporte :
1. Le multiplicateur de vitesse
Il sert à élever la vitesse de rotation entre l’arbre primaire et l’arbre secondaire qui entraîne la
génératrice électrique. En effet, la faible vitesse de rotation de l’éolienne ne permettrait pas de
générer du courant électrique dans de bonnes conditions avec les générateurs de courant
classiques. L’arbre secondaire comporte généralement un frein mécanique qui permet
d’immobiliser le rotor au cours des opérations de maintenance et d’éviter l’emballement de la
machine.
2. La génératrice
C’est elle qui convertit l’énergie mécanique en énergie électrique.
3. Un contrôleur électronique
Il est chargé de surveiller le fonctionnement de l’éolienne. Il s’agit en fait d’un ordinateur qui peut
gérer le démarrage de la machine lorsque la vitesse du vent est suffisante (de l’ordre de 3,5 m/s),
gérer le pas des pales, le freinage de la machine, l’orientation de l’ensemble rotor + nacelle face
au vent de manière à maximiser la récupération d’énergie et réduire les efforts sur l’installation.
Pour mener à bien ces différentes tâches, le contrôleur utilise les données fournies par un
anémomètre (vitesse du vent) et une girouette (direction du vent), habituellement situés à
l’arrière de la nacelle. Enfin, le contrôleur assure également la gestion des différentes pannes
pouvant survenir.
4. Le dispositif d’orientation de la nacelle.
Il permet la rotation de la nacelle à l’extrémité supérieure de la tour, autour de l’axe vertical.
L’orientation est généralement assurée par des moteurs électriques, par l’intermédiaire d’une
couronne dentée. De nombreuses éoliennes comportent un système de blocage mécanique de
la position de la nacelle suivant une orientation donnée : cela évite de solliciter constamment les
moteurs et permet aussi de bloquer l’éolienne durant les opérations de maintenance. Le dispositif
d’orientation comprend un compteur de tours, de manière à éviter de tordre inconsidérément le
câble acheminant l’énergie électrique provenant de la génératrice jusqu’au pied de la tour. En
effet, l’utilisation d’un collecteur tournant n’est guère envisageable au vu des intensités élevées
qui transitent (parfois plusieurs centaines d’ampères). Au bout d’un certain nombre de tours de la
nacelle, celle-ci est alors manœuvrée en sens inverse à l’aide des moteurs d’orientation pour
dévriller le câble. Celui-ci est généralement muni d’un interrupteur (actionné par la traction du
câble résultant de son vrillage) qui empêche toute rotation supplémentaire de la nacelle en cas
de défaillance du compteur.
5. Le dispositif d’orientation des pales
Il permet d’ajuster la portance des pales à la vitesse du vent pour maintenir une puissance
sensiblement constante dans la zone III de vitesse.
Tour
Son rôle est d’une part de supporter l’ensemble rotor + nacelle pour éviter que les pales ne touchent le
sol, mais aussi de placer le rotor à une hauteur suffisante, de manière à sortir autant que possible le rotor
du gradient de vent qui existe à proximité du sol, améliorant ainsi la captation de l’énergie.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%